For my FIRST blog Detectron2 - 1 has already demonstrated its stunning capability, I NEVER thought I’ll have a 2nd chance to write a 2nd blog about detectron2.
the left part contains multiple front-facing dancers
the right part contains a single back-facing fllower
2.1.1 Command Line for IUV
1 2 3 4 5 6 7 8 9 10 11 12
➜ DensePose git:(master) ✗ python apply_net.py show configs/densepose_rcnn_R_50_FPN_s1x.yaml ./pkl/IUV/R_50_FPN_s1x.pkl image.png dp_contour,bbox --output image_densepose_contour.png The checkpoint state_dict contains keys that are not used by the model: proposal_generator.anchor_generator.cell_anchors.{0, 1, 2, 3, 4} ~/.local/lib/python3.8/site-packages/torch/_tensor.py:585: UserWarning: floor_divide is deprecated, and will be removed in a future version of pytorch. It currently rounds toward 0 (like the 'trunc' function NOT 'floor'). This results in incorrect rounding for negative values. To keep the current behavior, use torch.div(a, b, rounding_mode='trunc'), or for actual floor division, use torch.div(a, b, rounding_mode='floor'). (Triggered internally at ../aten/src/ATen/native/BinaryOps.cpp:461.) return torch.floor_divide(self, other) ~/.local/lib/python3.8/site-packages/torch/nn/functional.py:718: UserWarning: Named tensors and all their associated APIs are an experimental feature and subject to change. Please do not use them for anything important until they are released as stable. (Triggered internally at ../c10/core/TensorImpl.h:1292.) return torch.max_pool2d(input, kernel_size, stride, padding, dilation, ceil_mode) ....../detectron2/projects/DensePose/densepose/vis/densepose_results.py:133: UserWarning: The following kwargs were not used by contour: 'cfg', 'texture_atlas', 'texture_atlases_dict' plt.contour(u, self.levels, extent=extent, **self.plot_args) ....../detectron2/projects/DensePose/densepose/vis/densepose_results.py:134: UserWarning: The following kwargs were not used by contour: 'cfg', 'texture_atlas', 'texture_atlases_dict' plt.contour(v, self.levels, extent=extent, **self.plot_args)
2.1.2 Command Line for CSE
It looks smpl_uvSnapshot_colors.jpg is missing?
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17
➜ DensePose git:(master) ✗ python apply_net.py show configs/cse/densepose_rcnn_R_50_FPN_s1x.yaml ./pkl/CSE/R_50_FPN_s1x.pkl image.png dp_vertex,bbox -v [06/28 16:19:54 apply_net]: Loading config from configs/cse/densepose_rcnn_R_50_FPN_s1x.yaml [06/28 16:19:54 apply_net]: Loading model from ./pkl/CSE/R_50_FPN_s1x.pkl The checkpoint state_dict contains keys that are not used by the model: pixel_mean pixel_std proposal_generator.anchor_generator.cell_anchors.{0, 1, 2, 3, 4} [06/28 16:19:56 apply_net]: Loading data from image.png ~/.local/lib/python3.8/site-packages/torch/_tensor.py:585: UserWarning: floor_divide is deprecated, and will be removed in a future version of pytorch. It currently rounds toward 0 (like the 'trunc' function NOT 'floor'). This results in incorrect rounding for negative values. To keep the current behavior, use torch.div(a, b, rounding_mode='trunc'), or for actual floor division, use torch.div(a, b, rounding_mode='floor'). (Triggered internally at ../aten/src/ATen/native/BinaryOps.cpp:461.) return torch.floor_divide(self, other) ~/.local/lib/python3.8/site-packages/torch/nn/functional.py:718: UserWarning: Named tensors and all their associated APIs are an experimental feature and subject to change. Please do not use them for anything important until they are released as stable. (Triggered internally at ../c10/core/TensorImpl.h:1292.) return torch.max_pool2d(input, kernel_size, stride, padding, dilation, ceil_mode) [06/28 16:19:57 apply_net]: Processing image.png ~/.local/lib/python3.8/site-packages/torch/nn/functional.py:3609: UserWarning: Default upsampling behavior when mode=bilinear is changed to align_corners=False since 0.4.0. Please specify align_corners=True if the old behavior is desired. See the documentation of nn.Upsample for details. warnings.warn( [06/28 16:19:58 apply_net]: Output saved to outputres.0001.png
2.1.3 Results
Dance Workout- EXO: Love Shot, follow by Kkardio
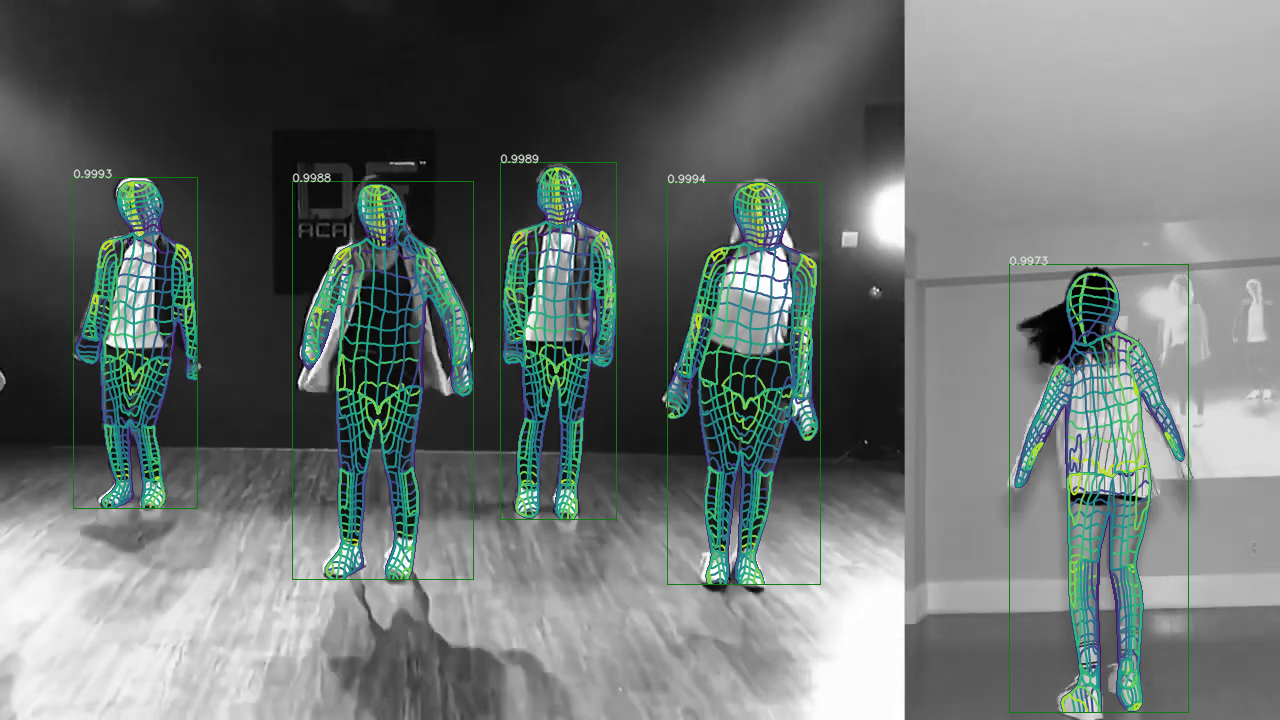
Dense Pose Contour IUV
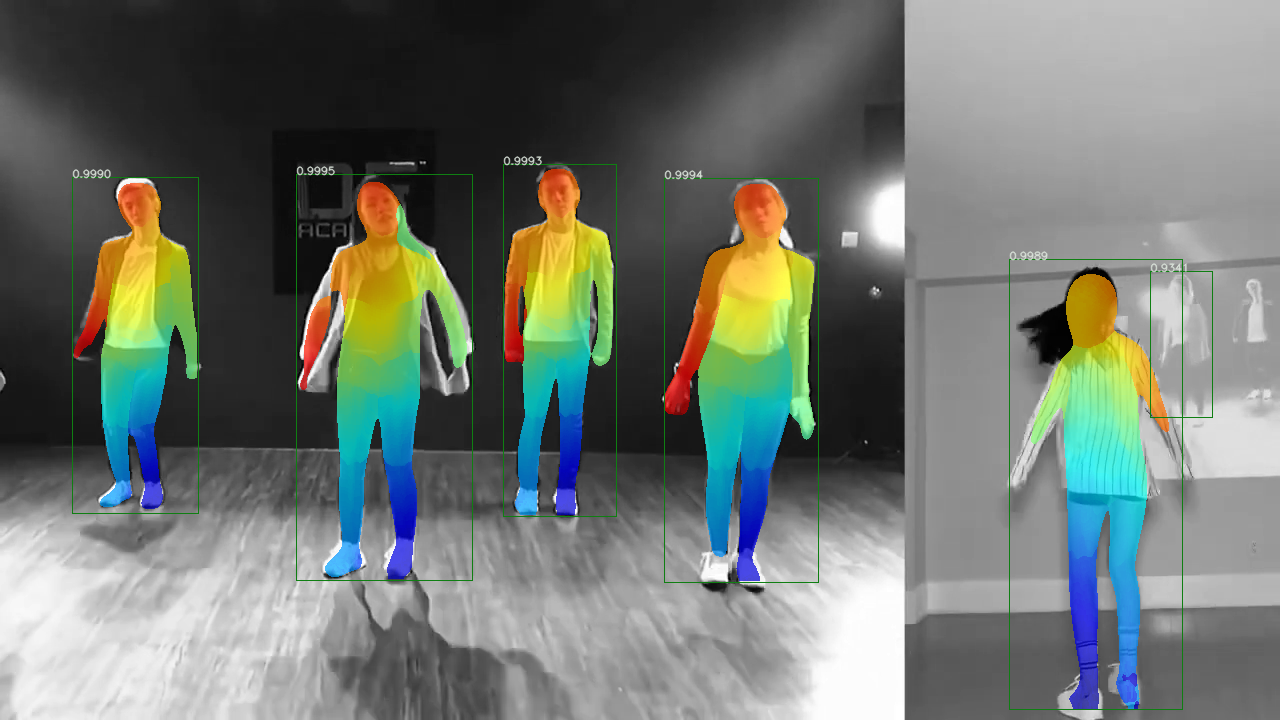
Dense Pose Continuous Surface Embedding
From the CSE result, it’s quite obvious that detectron2 Densepose CSE is able to tell the left leg from the right leg.