Today, I would disclose RISC-V. Let’s save my word and dive into it directly. As of today, December 18, 2023, MOST of RISC-V chips are designed and manufactured by Chinese companies.
➜ opensbi git:(master) make PLATFORM=generic FW_TEXT_START=0x40000000 FW_OPTIONS=0 CC lib/sbi/riscv_asm.o CC lib/sbi/riscv_atomic.o AS lib/sbi/riscv_hardfp.o CC lib/sbi/riscv_locks.o CC lib/sbi/sbi_ecall.o CC lib/sbi/sbi_ecall_exts.o CC lib/sbi/sbi_ecall_time.o CC lib/sbi/sbi_ecall_rfence.o CC lib/sbi/sbi_ecall_ipi.o CC lib/sbi/sbi_ecall_base.o CC lib/sbi/sbi_ecall_hsm.o CC lib/sbi/sbi_ecall_srst.o CC lib/sbi/sbi_ecall_susp.o CC lib/sbi/sbi_ecall_pmu.o CC lib/sbi/sbi_ecall_dbcn.o CC lib/sbi/sbi_ecall_cppc.o CC lib/sbi/sbi_ecall_legacy.o CC lib/sbi/sbi_ecall_vendor.o CC lib/sbi/sbi_bitmap.o CC lib/sbi/sbi_bitops.o CC lib/sbi/sbi_console.o CC lib/sbi/sbi_domain.o CC lib/sbi/sbi_emulate_csr.o CC lib/sbi/sbi_fifo.o CC lib/sbi/sbi_hart.o CC lib/sbi/sbi_heap.o CC lib/sbi/sbi_math.o AS lib/sbi/sbi_hfence.o CC lib/sbi/sbi_hsm.o CC lib/sbi/sbi_illegal_insn.o CC lib/sbi/sbi_init.o CC lib/sbi/sbi_ipi.o CC lib/sbi/sbi_irqchip.o CC lib/sbi/sbi_misaligned_ldst.o CC lib/sbi/sbi_platform.o CC lib/sbi/sbi_pmu.o CC lib/sbi/sbi_scratch.o CC lib/sbi/sbi_string.o CC lib/sbi/sbi_system.o CC lib/sbi/sbi_timer.o CC lib/sbi/sbi_tlb.o CC lib/sbi/sbi_trap.o CC lib/sbi/sbi_unpriv.o AS lib/sbi/sbi_expected_trap.o CC lib/sbi/sbi_cppc.o AR lib/libsbi.a CC platform/generic/lib/utils/timer/aclint_mtimer.o CC platform/generic/lib/utils/timer/andes_plmt.o CC platform/generic/lib/utils/timer/fdt_timer.o CC platform/generic/lib/utils/timer/fdt_timer_drivers.o CC platform/generic/lib/utils/timer/fdt_timer_mtimer.o CC platform/generic/lib/utils/timer/fdt_timer_plmt.o CC platform/generic/lib/utils/sys/htif.o CC platform/generic/lib/utils/sys/atcsmu.o CC platform/generic/lib/utils/serial/fdt_serial.o CC platform/generic/lib/utils/serial/fdt_serial_drivers.o CC platform/generic/lib/utils/serial/fdt_serial_cadence.o CC platform/generic/lib/utils/serial/fdt_serial_gaisler.o CC platform/generic/lib/utils/serial/fdt_serial_htif.o CC platform/generic/lib/utils/serial/fdt_serial_renesas_scif.o CC platform/generic/lib/utils/serial/fdt_serial_shakti.o CC platform/generic/lib/utils/serial/fdt_serial_sifive.o CC platform/generic/lib/utils/serial/fdt_serial_litex.o CC platform/generic/lib/utils/serial/fdt_serial_uart8250.o CC platform/generic/lib/utils/serial/fdt_serial_xlnx_uartlite.o CC platform/generic/lib/utils/serial/cadence-uart.o CC platform/generic/lib/utils/serial/gaisler-uart.o CC platform/generic/lib/utils/serial/renesas_scif.o CC platform/generic/lib/utils/serial/shakti-uart.o CC platform/generic/lib/utils/serial/sifive-uart.o CC platform/generic/lib/utils/serial/litex-uart.o CC platform/generic/lib/utils/serial/uart8250.o CC platform/generic/lib/utils/serial/xlnx-uartlite.o CC platform/generic/lib/utils/serial/semihosting.o CC platform/generic/lib/utils/reset/fdt_reset.o CC platform/generic/lib/utils/reset/fdt_reset_drivers.o CC platform/generic/lib/utils/reset/fdt_reset_atcwdt200.o CC platform/generic/lib/utils/reset/fdt_reset_gpio.o CC platform/generic/lib/utils/reset/fdt_reset_htif.o CC platform/generic/lib/utils/reset/fdt_reset_sunxi_wdt.o CC platform/generic/lib/utils/reset/fdt_reset_syscon.o CC platform/generic/lib/utils/regmap/fdt_regmap.o CC platform/generic/lib/utils/regmap/fdt_regmap_drivers.o CC platform/generic/lib/utils/regmap/fdt_regmap_syscon.o CC platform/generic/lib/utils/regmap/regmap.o CC platform/generic/lib/utils/libfdt/fdt.o CC platform/generic/lib/utils/libfdt/fdt_addresses.o CC platform/generic/lib/utils/libfdt/fdt_check.o CC platform/generic/lib/utils/libfdt/fdt_empty_tree.o CC platform/generic/lib/utils/libfdt/fdt_ro.o CC platform/generic/lib/utils/libfdt/fdt_rw.o CC platform/generic/lib/utils/libfdt/fdt_strerror.o CC platform/generic/lib/utils/libfdt/fdt_sw.o CC platform/generic/lib/utils/libfdt/fdt_wip.o CC platform/generic/lib/utils/irqchip/fdt_irqchip.o CC platform/generic/lib/utils/irqchip/fdt_irqchip_drivers.o CC platform/generic/lib/utils/irqchip/fdt_irqchip_aplic.o CC platform/generic/lib/utils/irqchip/fdt_irqchip_imsic.o CC platform/generic/lib/utils/irqchip/fdt_irqchip_plic.o CC platform/generic/lib/utils/irqchip/aplic.o CC platform/generic/lib/utils/irqchip/imsic.o CC platform/generic/lib/utils/irqchip/plic.o CC platform/generic/lib/utils/ipi/aclint_mswi.o CC platform/generic/lib/utils/ipi/andes_plicsw.o CC platform/generic/lib/utils/ipi/fdt_ipi.o CC platform/generic/lib/utils/ipi/fdt_ipi_drivers.o CC platform/generic/lib/utils/ipi/fdt_ipi_mswi.o CC platform/generic/lib/utils/ipi/fdt_ipi_plicsw.o CC platform/generic/lib/utils/i2c/i2c.o CC platform/generic/lib/utils/i2c/fdt_i2c.o CC platform/generic/lib/utils/i2c/fdt_i2c_adapter_drivers.o CC platform/generic/lib/utils/i2c/fdt_i2c_sifive.o CC platform/generic/lib/utils/i2c/fdt_i2c_dw.o CC platform/generic/lib/utils/i2c/dw_i2c.o CC platform/generic/lib/utils/gpio/fdt_gpio.o CC platform/generic/lib/utils/gpio/fdt_gpio_drivers.o CC platform/generic/lib/utils/gpio/fdt_gpio_designware.o CC platform/generic/lib/utils/gpio/fdt_gpio_sifive.o CC platform/generic/lib/utils/gpio/fdt_gpio_starfive.o CC platform/generic/lib/utils/gpio/gpio.o CC platform/generic/lib/utils/fdt/fdt_domain.o CC platform/generic/lib/utils/fdt/fdt_pmu.o CC platform/generic/lib/utils/fdt/fdt_helper.o CC platform/generic/lib/utils/fdt/fdt_fixup.o CC platform/generic/thead/thead_c9xx_pmu.o AS platform/generic/thead/thead_c9xx_tlb_trap_handler.o CC platform/generic/thead/thead_c9xx_errata_tlb_flush.o CC platform/generic/thead/thead-generic.o CC platform/generic/starfive/jh7110.o CC platform/generic/sophgo/sg2042.o CC platform/generic/sifive/fu540.o CC platform/generic/sifive/fu740.o CC platform/generic/renesas/rzfive/rzfive.o CC platform/generic/platform.o CC platform/generic/platform_override_modules.o CC platform/generic/andes/ae350.o AS platform/generic/andes/sleep.o CC platform/generic/andes/andes45-pma.o CC platform/generic/andes/andes_sbi.o CC platform/generic/andes/andes_pmu.o CC platform/generic/allwinner/sun20i-d1.o AR platform/generic/lib/libplatsbi.a AS platform/generic/firmware/payloads/test_head.o CC platform/generic/firmware/payloads/test_main.o MERGE platform/generic/firmware/payloads/test.o ELF platform/generic/firmware/payloads/test.elf OBJCOPY platform/generic/firmware/payloads/test.bin AS platform/generic/firmware/fw_dynamic.o ELF platform/generic/firmware/fw_dynamic.elf OBJCOPY platform/generic/firmware/fw_dynamic.bin AS platform/generic/firmware/fw_jump.o ELF platform/generic/firmware/fw_jump.elf OBJCOPY platform/generic/firmware/fw_jump.bin AS platform/generic/firmware/fw_payload.o ELF platform/generic/firmware/fw_payload.elf OBJCOPY platform/generic/firmware/fw_payload.bin
➜ busybox make CROSS_COMPILE=riscv64-linux-gnu- ARCH=riscv defconfig scripts/kconfig/conf -d Config.in * * Busybox Configuration * * * Settings * Enable compatibility for full-blown desktop systems (8kb) (DESKTOP) [Y/n/?] (NEW) y Provide compatible behavior for rare corner cases (bigger code) (EXTRA_COMPAT) [N/y/?] (NEW) n Building for Fedora distribution (FEDORA_COMPAT) [N/y/?] (NEW) n Enable obsolete features removed before SUSv3 (INCLUDE_SUSv2) [Y/n/?] (NEW) y Support --long-options (LONG_OPTS) [Y/?] (NEW) y Show applet usage messages (SHOW_USAGE) [Y/n/?] (NEW) y Show verbose applet usage messages (FEATURE_VERBOSE_USAGE) [Y/n/?] (NEW) y Store applet usage messages in compressed form (FEATURE_COMPRESS_USAGE) [Y/n/?] (NEW) y Support files > 2 GB (LFS) [Y/n/?] (NEW) y Support 64bit wide time types (TIME64) [Y/n/?] (NEW) y Support PAM (Pluggable Authentication Modules) (PAM) [N/y/?] (NEW) n Use the devpts filesystem for Unix98 PTYs (FEATURE_DEVPTS) [Y/n/?] (NEW) y Support utmp file (FEATURE_UTMP) [Y/n/?] (NEW) y Support wtmp file (FEATURE_WTMP) [Y/n/?] (NEW) y Support writing pidfiles (FEATURE_PIDFILE) [Y/n/?] (NEW) y Directory for pidfiles (PID_FILE_PATH) [/var/run] (NEW) /var/run Include busybox applet (BUSYBOX) [Y/n/?] (NEW) y Support --show SCRIPT (FEATURE_SHOW_SCRIPT) [Y/n] (NEW) y Support --install [-s] to install applet links at runtime (FEATURE_INSTALLER) [Y/n/?] (NEW) y Don't use /usr (INSTALL_NO_USR) [N/y/?] (NEW) n Drop SUID state for most applets (FEATURE_SUID) [Y/n/?] (NEW) y Enable SUID configuration via /etc/busybox.conf (FEATURE_SUID_CONFIG) [Y/n/?] (NEW) y Suppress warning message if /etc/busybox.conf is not readable (FEATURE_SUID_CONFIG_QUIET) [Y/n/?] (NEW) y exec prefers applets (FEATURE_PREFER_APPLETS) [N/y/?] (NEW) n Path to busybox executable (BUSYBOX_EXEC_PATH) [/proc/self/exe] (NEW) /proc/self/exe Support NSA Security Enhanced Linux (SELINUX) [N/y/?] (NEW) n Clean up all memory before exiting (usually not needed) (FEATURE_CLEAN_UP) [N/y/?] (NEW) n Support LOG_INFO level syslog messages (FEATURE_SYSLOG_INFO) [Y/n/?] (NEW) y * * * Build Options * ...... ...... ...... * * Options common to all shells * POSIX math support (FEATURE_SH_MATH) [Y/n/?] (NEW) y Extend POSIX math support to 64 bit (FEATURE_SH_MATH_64) [Y/n/?] (NEW) y Support BASE#nnnn literals (FEATURE_SH_MATH_BASE) [Y/n] (NEW) y Hide message on interactive shell startup (FEATURE_SH_EXTRA_QUIET) [Y/n/?] (NEW) y Standalone shell (FEATURE_SH_STANDALONE) [N/y/?] (NEW) n Run 'nofork' applets directly (FEATURE_SH_NOFORK) [N/y/?] (NEW) n read -t N.NNN support (+110 bytes) (FEATURE_SH_READ_FRAC) [Y/n/?] (NEW) y Use $HISTFILESIZE (FEATURE_SH_HISTFILESIZE) [Y/n/?] (NEW) y Embed scripts in the binary (FEATURE_SH_EMBEDDED_SCRIPTS) [Y/n/?] (NEW) y * * System Logging Utilities * klogd (6.2 kb) (KLOGD) [Y/n/?] (NEW) y * * klogd should not be used together with syslog to kernel printk buffer * Use the klogctl() interface (FEATURE_KLOGD_KLOGCTL) [Y/n/?] (NEW) y logger (6.5 kb) (LOGGER) [Y/n/?] (NEW) y logread (5 kb) (LOGREAD) [Y/n/?] (NEW) y Double buffering (FEATURE_LOGREAD_REDUCED_LOCKING) [Y/n/?] (NEW) y syslogd (14 kb) (SYSLOGD) [Y/n/?] (NEW) y Rotate message files (FEATURE_ROTATE_LOGFILE) [Y/n/?] (NEW) y Remote Log support (FEATURE_REMOTE_LOG) [Y/n/?] (NEW) y Support -D (drop dups) option (FEATURE_SYSLOGD_DUP) [Y/n/?] (NEW) y Support syslog.conf (FEATURE_SYSLOGD_CFG) [Y/n/?] (NEW) y Include milliseconds in timestamps (FEATURE_SYSLOGD_PRECISE_TIMESTAMPS) [N/y/?] (NEW) n Read buffer size in bytes (FEATURE_SYSLOGD_READ_BUFFER_SIZE) [256] (NEW) 256 Circular Buffer support (FEATURE_IPC_SYSLOG) [Y/n/?] (NEW) y Circular buffer size in Kbytes (minimum 4KB) (FEATURE_IPC_SYSLOG_BUFFER_SIZE) [16] (NEW) 16 Linux kernel printk buffer support (FEATURE_KMSG_SYSLOG) [Y/n/?] (NEW) y ➜ busybox
1 2 3 4 5 6 7 8 9
➜ busybox make CROSS_COMPILE=riscv64-linux-gnu- ARCH=riscv menuconfig scripts/kconfig/mconf Config.in # # using defaults found in .config #
*** End of configuration. *** Execute 'make' to build the project or try 'make help'.
➜ busybox make CROSS_COMPILE=riscv64-linux-gnu- ARCH=riscv -j8 LD archival/built-in.o CC archival/bzip2.o CC archival/bbunzip.o CC archival/chksum_and_xwrite_tar_header.o CC archival/dpkg.o CC archival/cpio.o CC archival/dpkg_deb.o LD archival/libarchive/built-in.o CC archival/gzip.o CC archival/libarchive/common.o CC archival/lzop.o CC archival/libarchive/data_align.o LD console-tools/built-in.o CC console-tools/chvt.o CC console-tools/clear.o CC console-tools/deallocvt.o CC archival/libarchive/data_extract_all.o LD coreutils/built-in.o CC coreutils/basename.o CC coreutils/cat.o CC console-tools/dumpkmap.o archival/libarchive/data_extract_all.c: In function ‘data_extract_all’: archival/libarchive/data_extract_all.c:235:25: warning: ignoring return value of ‘chown’ declared with attribute ‘warn_unused_result’ [-Wunused-result] 235 | chown(dst_name, uid, gid); | ^~~~~~~~~~~~~~~~~~~~~~~~~ LD coreutils/libcoreutils/built-in.o CC archival/libarchive/data_extract_to_command.o CC archival/libarchive/data_extract_to_stdout.o CC coreutils/libcoreutils/cp_mv_stat.o LD debianutils/built-in.o CC debianutils/pipe_progress.o console-tools/dumpkmap.c: In function ‘dumpkmap_main’: ...... ...... ...... CC libbb/verror_msg.o util-linux/mkfs_minix.c: In function ‘get_list_blocks’: util-linux/mkfs_minix.c:532:17: warning: ignoring return value of ‘fscanf’ declared with attribute ‘warn_unused_result’ [-Wunused-result] 532 | fscanf(listfile, "%lu\n", &blockno); | ^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ CC libbb/vfork_daemon_rexec.o CC libbb/warn_ignoring_args.o CC util-linux/mkswap.o CC util-linux/more.o CC libbb/wfopen.o CC util-linux/mount.o CC libbb/wfopen_input.o CC libbb/write.o CC util-linux/mountpoint.o CC libbb/xatonum.o CC util-linux/nsenter.o CC util-linux/pivot_root.o CC util-linux/rdate.o CC libbb/xconnect.o CC util-linux/rdev.o CC libbb/xfunc_die.o CC util-linux/readprofile.o CC libbb/xfuncs.o CC util-linux/renice.o CC libbb/xfuncs_printf.o CC util-linux/rev.o CC libbb/xgetcwd.o CC util-linux/rtcwake.o CC util-linux/script.o CC libbb/xgethostbyname.o CC libbb/xreadlink.o CC libbb/xrealloc_vector.o CC util-linux/scriptreplay.o CC util-linux/setarch.o CC libbb/xregcomp.o CC util-linux/setpriv.o CC util-linux/setsid.o CC util-linux/swaponoff.o CC util-linux/switch_root.o CC util-linux/taskset.o CC util-linux/uevent.o CC util-linux/umount.o AR libbb/lib.a CC util-linux/unshare.o CC util-linux/wall.o util-linux/unshare.c: In function ‘unshare_main’: util-linux/unshare.c:295:25: warning: ignoring return value of ‘read’ declared with attribute ‘warn_unused_result’ [-Wunused-result] 295 | read(fdp.rd, ns_ctx_list, 1); /* ...using bogus buffer */ | ^~~~~~~~~~~~~~~~~~~~~~~~~~~~ AR util-linux/lib.a LINK busybox_unstripped Trying libraries: m resolv rt Library m is needed, can't exclude it (yet) Library resolv is needed, can't exclude it (yet) Library rt is not needed, excluding it Library m is needed, can't exclude it (yet) Library resolv is needed, can't exclude it (yet) Final link with: m resolv
-------------------------------------------------- You will probably need to make your busybox binary setuid root to ensure all configured applets will work properly. --------------------------------------------------
Due to some kernel incompatibility issue, I asked a question at VisionFive2 Github issues: Failed to build VisionFive2 soft_3rdpart, which also provides the solution.
Build SPL Tool
Nothing tough.
2. Create Debian Root Filesystem
2.1 Create BootStrap Rootfs
Instead of using a snapshot, I’m using a standard release Debian 12.3 of sid.
Copy AIC8800 (WiFi-Dongle) and ESWIN6600U (WiFi-Dongle) Firmware: It looks to me: without using these 2 types of WiFi-Dongle, it’s pointless to copy the firmware files under the specified folder.
Copy Mesa Packages: I was trying to use the newest of today: Mesa v0.11.0-engineering-release-wayland, but finally realize there is NO point to carry out this step, for the Mesa version coming with Debian 12.3 is even newer..
Copy and Install Proprietary GPU Driver: this seems to be a MUST.
Copy Applications: I ignored this entire part.
3. Configure Debian
3.1 Chroot Bootstrap Rootfs
1 2 3 4
➜ VF2 sudo chroot $VF2_WORK_DIR/riscv-chroot root@lvision-MS-7C60:/# ls bin boot dev etc home lib media mnt opt proc root run sbin srv sys tmp usr var root@lvision-MS-7C60:/#
3.2 Update APT Source
1 2 3 4 5 6 7 8 9 10 11 12 13
root@lvision-MS-7C60:/# echo "Acquire::Check-Valid-Until no;" > /etc/apt/apt.conf.d/99-no-check-valid-until root@lvision-MS-7C60:/# apt update -y Hit:1 http://deb.debian.org/debian sid InRelease Get:2 http://deb.debian.org/debian sid/main Translation-en [7070 kB] Fetched 7070 kB in 6s (1200 kB/s) Reading package lists... Done Building dependency tree... Done All packages are up to date. root@lvision-MS-7C60:/# apt upgrade -y Reading package lists... Done Building dependency tree... Done Calculating upgrade... Done 0 upgraded, 0 newly installed, 0 to remove and 0 not upgraded.
root@lvision-MS-7C60:/# apt install initramfs-tools systemd-timesyncd rsync bash-completion u-boot-menu wget binutils alsa-utils Reading package lists... Done Building dependency tree... Done The following additional packages will be installed: alsa-topology-conf alsa-ucm-conf binutils-common binutils-riscv64-linux-gnu busybox ca-certificates initramfs-tools-core klibc-utils libasound2 libasound2-data libatopology2 libbinutils libctf-nobfd0 libctf0 libfftw3-single3 libgomp1 libklibc libpsl5 libsamplerate0 libsframe1 linux-base openssl publicsuffix zstd Suggested packages: dialog binutils-doc gprofng-gui libasound2-plugins libfftw3-bin libfftw3-dev openssh-client openssh-server python3 python3-braceexpand flash-kernel The following NEW packages will be installed: alsa-topology-conf alsa-ucm-conf alsa-utils bash-completion binutils binutils-common binutils-riscv64-linux-gnu busybox ca-certificates initramfs-tools initramfs-tools-core klibc-utils libasound2 libasound2-data libatopology2 libbinutils libctf-nobfd0 libctf0 libfftw3-single3 libgomp1 libklibc libpsl5 libsamplerate0 libsframe1 linux-base openssl publicsuffix rsync systemd-timesyncd u-boot-menu wget zstd 0 upgraded, 32 newly installed, 0 to remove and 0 not upgraded. Need to get 12.3 MB of archives. After this operation, 44.9 MB of additional disk space will be used. Do you want to continue? [Y/n] Get:1 http://deb.debian.org/debian sid/main riscv64 rsync riscv64 3.2.7-1 [425 kB] Get:2 http://deb.debian.org/debian sid/main riscv64 bash-completion all 1:2.11-8 [224 kB] Get:3 http://deb.debian.org/debian sid/main riscv64 openssl riscv64 3.1.4-2 [1408 kB] Get:4 http://deb.debian.org/debian sid/main riscv64 ca-certificates all 20230311 [153 kB] Get:5 http://deb.debian.org/debian sid/main riscv64 systemd-timesyncd riscv64 255-1 [69.2 kB] Get:6 http://deb.debian.org/debian sid/main riscv64 libpsl5 riscv64 0.21.2-1+b1 [59.4 kB] Get:7 http://deb.debian.org/debian sid/main riscv64 wget riscv64 1.21.4-1 [963 kB] Get:8 http://deb.debian.org/debian sid/main riscv64 alsa-topology-conf all 1.2.5.1-2 [15.2 kB] Get:9 http://deb.debian.org/debian sid/main riscv64 libasound2-data all 1.2.10-1 [20.6 kB] Get:10 http://deb.debian.org/debian sid/main riscv64 libasound2 riscv64 1.2.10-1 [378 kB] Get:11 http://deb.debian.org/debian sid/main riscv64 alsa-ucm-conf all 1.2.10-1 [60.3 kB] Get:12 http://deb.debian.org/debian sid/main riscv64 libatopology2 riscv64 1.2.10-1 [60.5 kB] Get:13 http://deb.debian.org/debian sid/main riscv64 libgomp1 riscv64 13.2.0-8 [125 kB] Get:14 http://deb.debian.org/debian sid/main riscv64 libfftw3-single3 riscv64 3.3.10-1 [380 kB] Get:15 http://deb.debian.org/debian sid/main riscv64 libsamplerate0 riscv64 0.2.2-4 [950 kB] Get:16 http://deb.debian.org/debian sid/main riscv64 alsa-utils riscv64 1.2.10-1 [1125 kB] Get:17 http://deb.debian.org/debian sid/main riscv64 binutils-common riscv64 2.41.50.20231206-1 [2379 kB] Get:18 http://deb.debian.org/debian sid/main riscv64 libsframe1 riscv64 2.41.50.20231206-1 [76.1 kB] Get:19 http://deb.debian.org/debian sid/main riscv64 libbinutils riscv64 2.41.50.20231206-1 [501 kB] Get:20 http://deb.debian.org/debian sid/main riscv64 libctf-nobfd0 riscv64 2.41.50.20231206-1 [157 kB] Get:21 http://deb.debian.org/debian sid/main riscv64 libctf0 riscv64 2.41.50.20231206-1 [92.5 kB] Get:22 http://deb.debian.org/debian sid/main riscv64 binutils-riscv64-linux-gnu riscv64 2.41.50.20231206-1 [836 kB] Get:23 http://deb.debian.org/debian sid/main riscv64 binutils riscv64 2.41.50.20231206-1 [65.9 kB] Get:24 http://deb.debian.org/debian sid/main riscv64 busybox riscv64 1:1.36.1-6 [509 kB] Get:25 http://deb.debian.org/debian sid/main riscv64 libklibc riscv64 2.0.13-2 [51.0 kB] Get:26 http://deb.debian.org/debian sid/main riscv64 klibc-utils riscv64 2.0.13-2 [108 kB] Get:27 http://deb.debian.org/debian sid/main riscv64 initramfs-tools-core all 0.142 [105 kB] Get:28 http://deb.debian.org/debian sid/main riscv64 linux-base all 4.9 [31.8 kB] Get:29 http://deb.debian.org/debian sid/main riscv64 initramfs-tools all 0.142 [72.9 kB] Get:30 http://deb.debian.org/debian sid/main riscv64 publicsuffix all 20231001.0357-0.1 [125 kB] Get:31 http://deb.debian.org/debian sid/main riscv64 u-boot-menu all 4.2.2 [9436 B] Get:32 http://deb.debian.org/debian sid/main riscv64 zstd riscv64 1.5.5+dfsg2-2 [771 kB] Fetched 12.3 MB in 11s (1082 kB/s) perl: warning: Setting locale failed. perl: warning: Please check that your locale settings: LANGUAGE = "en_CA:en", LC_ALL = (unset), LC_PAPER = "en_CA.UTF-8", LC_NUMERIC = "en_CA.UTF-8", LC_IDENTIFICATION = "en_CA.UTF-8", LC_MEASUREMENT = "en_CA.UTF-8", LC_NAME = "en_CA.UTF-8", LC_TELEPHONE = "en_CA.UTF-8", LC_ADDRESS = "en_CA.UTF-8", LC_MONETARY = "en_CA.UTF-8", LC_TIME = "en_CA.UTF-8", LANG = "en_CA.UTF-8" are supported and installed on your system. perl: warning: Falling back to the standard locale ("C"). locale: Cannot set LC_CTYPE to default locale: No such file or directory locale: Cannot set LC_MESSAGES to default locale: No such file or directory locale: Cannot set LC_ALL to default locale: No such file or directory Extracting templates from packages: 100% Preconfiguring packages ... E: Can not write log (Is /dev/pts mounted?) - posix_openpt (19: No such device) Selecting previously unselected package rsync. (Reading database ... 10297 files and directories currently installed.) Preparing to unpack .../00-rsync_3.2.7-1_riscv64.deb ... Unpacking rsync (3.2.7-1) ... Selecting previously unselected package bash-completion. Preparing to unpack .../01-bash-completion_1%3a2.11-8_all.deb ... Unpacking bash-completion (1:2.11-8) ... Selecting previously unselected package openssl. Preparing to unpack .../02-openssl_3.1.4-2_riscv64.deb ... Unpacking openssl (3.1.4-2) ... Selecting previously unselected package ca-certificates. Preparing to unpack .../03-ca-certificates_20230311_all.deb ... Unpacking ca-certificates (20230311) ... Selecting previously unselected package systemd-timesyncd. Preparing to unpack .../04-systemd-timesyncd_255-1_riscv64.deb ... Unpacking systemd-timesyncd (255-1) ... Selecting previously unselected package libpsl5:riscv64. Preparing to unpack .../05-libpsl5_0.21.2-1+b1_riscv64.deb ... Unpacking libpsl5:riscv64 (0.21.2-1+b1) ... Selecting previously unselected package wget. Preparing to unpack .../06-wget_1.21.4-1_riscv64.deb ... Unpacking wget (1.21.4-1) ... Selecting previously unselected package alsa-topology-conf. Preparing to unpack .../07-alsa-topology-conf_1.2.5.1-2_all.deb ... Unpacking alsa-topology-conf (1.2.5.1-2) ... Selecting previously unselected package libasound2-data. Preparing to unpack .../08-libasound2-data_1.2.10-1_all.deb ... Unpacking libasound2-data (1.2.10-1) ... Selecting previously unselected package libasound2:riscv64. Preparing to unpack .../09-libasound2_1.2.10-1_riscv64.deb ... Unpacking libasound2:riscv64 (1.2.10-1) ... Selecting previously unselected package alsa-ucm-conf. Preparing to unpack .../10-alsa-ucm-conf_1.2.10-1_all.deb ... Unpacking alsa-ucm-conf (1.2.10-1) ... Selecting previously unselected package libatopology2:riscv64. Preparing to unpack .../11-libatopology2_1.2.10-1_riscv64.deb ... Unpacking libatopology2:riscv64 (1.2.10-1) ... Selecting previously unselected package libgomp1:riscv64. Preparing to unpack .../12-libgomp1_13.2.0-8_riscv64.deb ... Unpacking libgomp1:riscv64 (13.2.0-8) ... Selecting previously unselected package libfftw3-single3:riscv64. Preparing to unpack .../13-libfftw3-single3_3.3.10-1_riscv64.deb ... Unpacking libfftw3-single3:riscv64 (3.3.10-1) ... Selecting previously unselected package libsamplerate0:riscv64. Preparing to unpack .../14-libsamplerate0_0.2.2-4_riscv64.deb ... Unpacking libsamplerate0:riscv64 (0.2.2-4) ... Selecting previously unselected package alsa-utils. Preparing to unpack .../15-alsa-utils_1.2.10-1_riscv64.deb ... Unpacking alsa-utils (1.2.10-1) ... Selecting previously unselected package binutils-common:riscv64. Preparing to unpack .../16-binutils-common_2.41.50.20231206-1_riscv64.deb ... Unpacking binutils-common:riscv64 (2.41.50.20231206-1) ... Selecting previously unselected package libsframe1:riscv64. Preparing to unpack .../17-libsframe1_2.41.50.20231206-1_riscv64.deb ... Unpacking libsframe1:riscv64 (2.41.50.20231206-1) ... Selecting previously unselected package libbinutils:riscv64. Preparing to unpack .../18-libbinutils_2.41.50.20231206-1_riscv64.deb ... Unpacking libbinutils:riscv64 (2.41.50.20231206-1) ... Selecting previously unselected package libctf-nobfd0:riscv64. Preparing to unpack .../19-libctf-nobfd0_2.41.50.20231206-1_riscv64.deb ... Unpacking libctf-nobfd0:riscv64 (2.41.50.20231206-1) ... Selecting previously unselected package libctf0:riscv64. Preparing to unpack .../20-libctf0_2.41.50.20231206-1_riscv64.deb ... Unpacking libctf0:riscv64 (2.41.50.20231206-1) ... Selecting previously unselected package binutils-riscv64-linux-gnu. Preparing to unpack .../21-binutils-riscv64-linux-gnu_2.41.50.20231206-1_riscv64.deb ... Unpacking binutils-riscv64-linux-gnu (2.41.50.20231206-1) ... Selecting previously unselected package binutils. Preparing to unpack .../22-binutils_2.41.50.20231206-1_riscv64.deb ... Unpacking binutils (2.41.50.20231206-1) ... Selecting previously unselected package busybox. Preparing to unpack .../23-busybox_1%3a1.36.1-6_riscv64.deb ... Unpacking busybox (1:1.36.1-6) ... Selecting previously unselected package libklibc:riscv64. Preparing to unpack .../24-libklibc_2.0.13-2_riscv64.deb ... Unpacking libklibc:riscv64 (2.0.13-2) ... Selecting previously unselected package klibc-utils. Preparing to unpack .../25-klibc-utils_2.0.13-2_riscv64.deb ... Unpacking klibc-utils (2.0.13-2) ... Selecting previously unselected package initramfs-tools-core. Preparing to unpack .../26-initramfs-tools-core_0.142_all.deb ... Unpacking initramfs-tools-core (0.142) ... Selecting previously unselected package linux-base. Preparing to unpack .../27-linux-base_4.9_all.deb ... Unpacking linux-base (4.9) ... Selecting previously unselected package initramfs-tools. Preparing to unpack .../28-initramfs-tools_0.142_all.deb ... Unpacking initramfs-tools (0.142) ... Selecting previously unselected package publicsuffix. Preparing to unpack .../29-publicsuffix_20231001.0357-0.1_all.deb ... Unpacking publicsuffix (20231001.0357-0.1) ... Selecting previously unselected package u-boot-menu. Preparing to unpack .../30-u-boot-menu_4.2.2_all.deb ... Unpacking u-boot-menu (4.2.2) ... Selecting previously unselected package zstd. Preparing to unpack .../31-zstd_1.5.5+dfsg2-2_riscv64.deb ... Unpacking zstd (1.5.5+dfsg2-2) ... Setting up libpsl5:riscv64 (0.21.2-1+b1) ... Setting up linux-base (4.9) ... locale: Cannot set LC_CTYPE to default locale: No such file or directory locale: Cannot set LC_MESSAGES to default locale: No such file or directory locale: Cannot set LC_ALL to default locale: No such file or directory Setting up wget (1.21.4-1) ... Setting up binutils-common:riscv64 (2.41.50.20231206-1) ... Setting up libctf-nobfd0:riscv64 (2.41.50.20231206-1) ... Setting up libgomp1:riscv64 (13.2.0-8) ... Setting up libsframe1:riscv64 (2.41.50.20231206-1) ... Setting up libasound2-data (1.2.10-1) ... Setting up busybox (1:1.36.1-6) ... Setting up libklibc:riscv64 (2.0.13-2) ... Setting up bash-completion (1:2.11-8) ... Setting up systemd-timesyncd (255-1) ... Creating group 'systemd-timesync' with GID 992. Creating user 'systemd-timesync' (systemd Time Synchronization) with UID 992 and GID 992. ⚠️ /proc/ is not mounted. This is not a supported mode of operation. Please fix your invocation environment to mount /proc/ and /sys/ properly. Proceeding anyway. Your mileage may vary. Created symlink /etc/systemd/system/dbus-org.freedesktop.timesync1.service → /usr/lib/systemd/system/systemd-timesyncd.service. Created symlink /etc/systemd/system/sysinit.target.wants/systemd-timesyncd.service → /usr/lib/systemd/system/systemd-timesyncd.service. Setting up alsa-topology-conf (1.2.5.1-2) ... Setting up libasound2:riscv64 (1.2.10-1) ... Setting up libbinutils:riscv64 (2.41.50.20231206-1) ... Setting up klibc-utils (2.0.13-2) ... No diversion 'diversion of /usr/share/initramfs-tools/hooks/klibc to /usr/share/initramfs-tools/hooks/klibc^i-t by klibc-utils', none removed. Setting up libsamplerate0:riscv64 (0.2.2-4) ... Setting up openssl (3.1.4-2) ... Setting up libatopology2:riscv64 (1.2.10-1) ... Setting up publicsuffix (20231001.0357-0.1) ... Setting up zstd (1.5.5+dfsg2-2) ... Setting up rsync (3.2.7-1) ... ⚠️ /proc/ is not mounted. This is not a supported mode of operation. Please fix your invocation environment to mount /proc/ and /sys/ properly. Proceeding anyway. Your mileage may vary. Running in chroot, ignoring request. Setting up libctf0:riscv64 (2.41.50.20231206-1) ... Setting up u-boot-menu (4.2.2) ... Setting up libfftw3-single3:riscv64 (3.3.10-1) ... Setting up alsa-ucm-conf (1.2.10-1) ... Setting up binutils-riscv64-linux-gnu (2.41.50.20231206-1) ... Setting up binutils (2.41.50.20231206-1) ... Setting up ca-certificates (20230311) ... locale: Cannot set LC_CTYPE to default locale: No such file or directory locale: Cannot set LC_MESSAGES to default locale: No such file or directory locale: Cannot set LC_ALL to default locale: No such file or directory Updating certificates in /etc/ssl/certs... 140 added, 0 removed; done. Setting up alsa-utils (1.2.10-1) ... Setting up initramfs-tools-core (0.142) ... Setting up initramfs-tools (0.142) ... update-initramfs: deferring update (trigger activated) Processing triggers for libc-bin (2.37-13) ... Processing triggers for ca-certificates (20230311) ... Updating certificates in /etc/ssl/certs... 0 added, 0 removed; done. Running hooks in /etc/ca-certificates/update.d... done. Processing triggers for initramfs-tools (0.142) ...
Can anybody tell me why:
1 2 3
/proc/ is not mounted. This is not a supported mode of operation. Please fix your invocation environment to mount /proc/ and /sys/ properly. Proceeding anyway. Your mileage may vary.
There is a clear typo, replace sudo to apt install.
Setting up notification-daemon (3.20.0-4) ... Setting up at-spi2-core (2.50.0-1) ... Setting up libayatana-indicator3-7:riscv64 (0.9.3-1.1) ... Setting up libgcr-ui-3-1:riscv64 (3.41.1-3) ... Setting up gcr (3.41.1-3) ... ⚠️ /proc/ is not mounted. This is not a supported mode of operation. Please fix your invocation environment to mount /proc/ and /sys/ properly. Proceeding anyway. Your mileage may vary. Created symlink /etc/systemd/user/graphical-session-pre.target.wants/gcr-ssh-agent.service → /usr/lib/systemd/user/gcr-ssh-agent.service. Created symlink /etc/systemd/user/sockets.target.wants/gcr-ssh-agent.socket → /usr/lib/systemd/user/gcr-ssh-agent.socket. ⚠️ /proc/ is not mounted. This is not a supported mode of operation. Please fix your invocation environment to mount /proc/ and /sys/ properly. Proceeding anyway. Your mileage may vary. Setting up pinentry-gnome3 (1.2.1-3) ... Setting up libayatana-appindicator3-1 (0.5.93-1) ... Setting up gnome-keyring (42.1-1) ... ⚠️ /proc/ is not mounted. This is not a supported mode of operation. Please fix your invocation environment to mount /proc/ and /sys/ properly. Proceeding anyway. Your mileage may vary. Created symlink /etc/systemd/user/graphical-session-pre.target.wants/gnome-keyring-daemon.service → /usr/lib/systemd/user/gnome-keyring-daemon.service. Created symlink /etc/systemd/user/sockets.target.wants/gnome-keyring-daemon.socket → /usr/lib/systemd/user/gnome-keyring-daemon.socket. ⚠️ /proc/ is not mounted. This is not a supported mode of operation. Please fix your invocation environment to mount /proc/ and /sys/ properly. Proceeding anyway. Your mileage may vary. Processing triggers for libc-bin (2.37-13) ... Processing triggers for sgml-base (1.31) ... Setting up polkitd (123-3) ... Creating group 'polkitd' with GID 991. Creating user 'polkitd' (polkit) with UID 991 and GID 991. ⚠️ /proc/ is not mounted. This is not a supported mode of operation. Please fix your invocation environment to mount /proc/ and /sys/ properly. Proceeding anyway. Your mileage may vary. Running in chroot, ignoring request. Reloading system message bus config...Failed to open connection to "system" message bus: Failed to connect to socket /run/dbus/system_bus_socket: No such file or directory invoke-rc.d: initscript dbus, action "reload" failed. /proc/ is not mounted, but required for successful operation of systemd-tmpfiles. Please mount /proc/. Alternatively, consider using the --root= or --image= switches. start-stop-daemon: nothing in /proc - not mounted? start-stop-daemon: unable to stat /usr/libexec/polkitd (No such file or directory) Setting up policykit-1-gnome (0.105-8) ... Setting up network-manager (1.44.2-6) ... ⚠️ /proc/ is not mounted. This is not a supported mode of operation. Please fix your invocation environment to mount /proc/ and /sys/ properly. Proceeding anyway. Your mileage may vary. Created symlink /etc/systemd/system/dbus-org.freedesktop.nm-dispatcher.service → /usr/lib/systemd/system/NetworkManager-dispatcher.service. ⚠️ /proc/ is not mounted. This is not a supported mode of operation. Please fix your invocation environment to mount /proc/ and /sys/ properly. Proceeding anyway. Your mileage may vary. Created symlink /etc/systemd/system/network-online.target.wants/NetworkManager-wait-online.service → /usr/lib/systemd/system/NetworkManager-wait-online.service. ⚠️ /proc/ is not mounted. This is not a supported mode of operation. Please fix your invocation environment to mount /proc/ and /sys/ properly. Proceeding anyway. Your mileage may vary. Created symlink /etc/systemd/system/multi-user.target.wants/NetworkManager.service → /usr/lib/systemd/system/NetworkManager.service. Setting up modemmanager (1.22.0-1) ... ⚠️ /proc/ is not mounted. This is not a supported mode of operation. Please fix your invocation environment to mount /proc/ and /sys/ properly. Proceeding anyway. Your mileage may vary. Created symlink /etc/systemd/system/dbus-org.freedesktop.ModemManager1.service → /usr/lib/systemd/system/ModemManager.service. Created symlink /etc/systemd/system/multi-user.target.wants/ModemManager.service → /usr/lib/systemd/system/ModemManager.service. Setting up network-manager-gnome (1.34.0-2) ... Processing triggers for dbus (1.14.10-3) ... Processing triggers for libgdk-pixbuf-2.0-0:riscv64 (2.42.10+dfsg-3) ... root@lvision-MS-7C60:/# ls bin boot dev etc home lib media mnt opt proc root run sbin srv sys tmp usr var root@lvision-MS-7C60:/# ls proc root@lvision-MS-7C60:/#
root@lvision-MS-7C60:/# DEBIAN_FRONTEND=noninteractive apt-get install gnome-shell gnome-terminal gnome-tweaks gnome-shell-extensions -y Reading package lists... Done Building dependency tree... Done Reading state information... Done Package gnome-shell is not available, but is referred to by another package. This may mean that the package is missing, has been obsoleted, or is only available from another source However the following packages replace it: gnome-shell-common
E: Package 'gnome-shell' has no installation candidate root@lvision-MS-7C60:/# DEBIAN_FRONTEND=noninteractive apt-get install gnome-terminal gnome-tweaks gnome-shell-extensions -y Reading package lists... Done Building dependency tree... Done Reading state information... Done Some packages could not be installed. This may mean that you have requested an impossible situation or if you are using the unstable distribution that some required packages have not yet been created or been moved out of Incoming. The following information may help to resolve the situation:
root@lvision-MS-7C60:/# dpkg-reconfigure linux-image-6.6.5-starfive perl: warning: Setting locale failed. perl: warning: Please check that your locale settings: LANGUAGE = "en_CA:en", LC_ALL = (unset), LC_NUMERIC = "en_CA.UTF-8", LC_TIME = "en_CA.UTF-8", LC_MEASUREMENT = "en_CA.UTF-8", LC_TELEPHONE = "en_CA.UTF-8", LC_IDENTIFICATION = "en_CA.UTF-8", LC_PAPER = "en_CA.UTF-8", LC_MONETARY = "en_CA.UTF-8", LC_NAME = "en_CA.UTF-8", LC_ADDRESS = "en_CA.UTF-8", LANG = "en_CA.UTF-8" are supported and installed on your system. perl: warning: Falling back to the standard locale ("C"). locale: Cannot set LC_CTYPE to default locale: No such file or directory locale: Cannot set LC_MESSAGES to default locale: No such file or directory locale: Cannot set LC_ALL to default locale: No such file or directory update-initramfs: Generating /boot/initrd.img-6.6.5-starfive W: Possible missing firmware /lib/firmware/rtl_nic/rtl8125b-2.fw for built-in driver r8169 W: Possible missing firmware /lib/firmware/rtl_nic/rtl8125a-3.fw for built-in driver r8169 W: Possible missing firmware /lib/firmware/rtl_nic/rtl8107e-2.fw for built-in driver r8169 W: Possible missing firmware /lib/firmware/rtl_nic/rtl8168fp-3.fw for built-in driver r8169 W: Possible missing firmware /lib/firmware/rtl_nic/rtl8168h-2.fw for built-in driver r8169 W: Possible missing firmware /lib/firmware/rtl_nic/rtl8168g-3.fw for built-in driver r8169 W: Possible missing firmware /lib/firmware/rtl_nic/rtl8168g-2.fw for built-in driver r8169 W: Possible missing firmware /lib/firmware/rtl_nic/rtl8106e-2.fw for built-in driver r8169 W: Possible missing firmware /lib/firmware/rtl_nic/rtl8106e-1.fw for built-in driver r8169 W: Possible missing firmware /lib/firmware/rtl_nic/rtl8411-2.fw for built-in driver r8169 W: Possible missing firmware /lib/firmware/rtl_nic/rtl8411-1.fw for built-in driver r8169 W: Possible missing firmware /lib/firmware/rtl_nic/rtl8402-1.fw for built-in driver r8169 W: Possible missing firmware /lib/firmware/rtl_nic/rtl8168f-2.fw for built-in driver r8169 W: Possible missing firmware /lib/firmware/rtl_nic/rtl8168f-1.fw for built-in driver r8169 W: Possible missing firmware /lib/firmware/rtl_nic/rtl8105e-1.fw for built-in driver r8169 W: Possible missing firmware /lib/firmware/rtl_nic/rtl8168e-3.fw for built-in driver r8169 W: Possible missing firmware /lib/firmware/rtl_nic/rtl8168e-2.fw for built-in driver r8169 W: Possible missing firmware /lib/firmware/rtl_nic/rtl8168e-1.fw for built-in driver r8169 W: Possible missing firmware /lib/firmware/rtl_nic/rtl8168d-2.fw for built-in driver r8169 W: Possible missing firmware /lib/firmware/rtl_nic/rtl8168d-1.fw for built-in driver r8169 W: Possible missing firmware /lib/firmware/iwlwifi-100-5.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-1000-5.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-135-6.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-105-6.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-2030-6.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-2000-6.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-5150-2.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-5000-5.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-6000g2b-6.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-6000g2a-6.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-6050-5.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-6000-6.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-7265D-29.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-7265-17.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-3168-29.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-3160-17.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-7260-17.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-8265-36.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-8000C-36.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-9260-th-b0-jf-b0-46.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-9000-pu-b0-jf-b0-46.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-cc-a0-77.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-QuZ-a0-jf-b0-77.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-QuZ-a0-hr-b0-77.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-Qu-b0-jf-b0-77.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-Qu-c0-hr-b0-77.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-Qu-b0-hr-b0-77.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-ma-b0-mr-a0-83.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-ma-b0-gf4-a0-83.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-ma-b0-gf-a0-83.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-ma-b0-hr-b0-83.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-ma-a0-mr-a0-83.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-ma-a0-gf4-a0-83.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-ma-a0-gf-a0-83.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-ma-a0-hr-b0-83.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-ty-a0-gf-a0-83.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-so-a0-gf-a0-83.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-so-a0-hr-b0-83.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-so-a0-jf-b0-83.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-gl-c0-fm-c0-83.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-gl-b0-fm-b0-83.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-bz-a0-fm4-b0-83.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-bz-a0-fm-c0-83.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-bz-a0-fm-b0-83.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-bz-a0-gf4-a0-83.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-bz-a0-gf-a0-83.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-bz-a0-hr-b0-83.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-sc-a0-wh-a0-83.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-sc-a0-gf4-a0-83.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-sc-a0-gf-a0-83.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-sc-a0-hr-b0-83.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-sc-a0-hr-b0-83.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-sc-a0-fm-c0-83.ucode for built-in driver iwlwifi W: Possible missing firmware /lib/firmware/iwlwifi-sc-a0-fm-b0-83.ucode for built-in driver iwlwifi cp: not replacing '/var/tmp/mkinitramfs_VdCKqO/bin/cat' cp: not replacing '/var/tmp/mkinitramfs_VdCKqO/bin/cpio' cp: not replacing '/var/tmp/mkinitramfs_VdCKqO/bin/dd' cp: not replacing '/var/tmp/mkinitramfs_VdCKqO/bin/dmesg' cp: not replacing '/var/tmp/mkinitramfs_VdCKqO/bin/false' cp: not replacing '/var/tmp/mkinitramfs_VdCKqO/bin/gunzip' cp: not replacing '/var/tmp/mkinitramfs_VdCKqO/bin/kill' cp: not replacing '/var/tmp/mkinitramfs_VdCKqO/bin/ln' cp: not replacing '/var/tmp/mkinitramfs_VdCKqO/bin/ls' cp: not replacing '/var/tmp/mkinitramfs_VdCKqO/bin/mkdir' cp: not replacing '/var/tmp/mkinitramfs_VdCKqO/bin/mkfifo' cp: not replacing '/var/tmp/mkinitramfs_VdCKqO/bin/mknod' cp: not replacing '/var/tmp/mkinitramfs_VdCKqO/bin/mount' cp: not replacing '/var/tmp/mkinitramfs_VdCKqO/bin/mv' cp: not replacing '/var/tmp/mkinitramfs_VdCKqO/bin/nuke' cp: not replacing '/var/tmp/mkinitramfs_VdCKqO/bin/readlink' cp: not replacing '/var/tmp/mkinitramfs_VdCKqO/bin/resume' cp: not replacing '/var/tmp/mkinitramfs_VdCKqO/bin/sh' cp: not replacing '/var/tmp/mkinitramfs_VdCKqO/bin/sleep' cp: not replacing '/var/tmp/mkinitramfs_VdCKqO/bin/sync' cp: not replacing '/var/tmp/mkinitramfs_VdCKqO/bin/true' cp: not replacing '/var/tmp/mkinitramfs_VdCKqO/bin/umount' cp: not replacing '/var/tmp/mkinitramfs_VdCKqO/bin/uname' P: Checking for EXTLINUX directory... not found. P: Creating EXTLINUX directory... done: /boot/extlinux cat: /proc/cmdline: No such file or directory perl: warning: Setting locale failed. perl: warning: Please check that your locale settings: LANGUAGE = "en_CA:en", LC_ALL = (unset), LC_PAPER = "en_CA.UTF-8", LC_NUMERIC = "en_CA.UTF-8", LC_IDENTIFICATION = "en_CA.UTF-8", LC_MEASUREMENT = "en_CA.UTF-8", LC_NAME = "en_CA.UTF-8", LC_TELEPHONE = "en_CA.UTF-8", LC_ADDRESS = "en_CA.UTF-8", LC_MONETARY = "en_CA.UTF-8", LC_TIME = "en_CA.UTF-8", LANG = "en_CA.UTF-8" are supported and installed on your system. perl: warning: Falling back to the standard locale ("C"). perl: warning: Setting locale failed. perl: warning: Please check that your locale settings: LANGUAGE = "en_CA:en", LC_ALL = (unset), LC_PAPER = "en_CA.UTF-8", LC_NUMERIC = "en_CA.UTF-8", LC_IDENTIFICATION = "en_CA.UTF-8", LC_MEASUREMENT = "en_CA.UTF-8", LC_NAME = "en_CA.UTF-8", LC_TELEPHONE = "en_CA.UTF-8", LC_ADDRESS = "en_CA.UTF-8", LC_MONETARY = "en_CA.UTF-8", LC_TIME = "en_CA.UTF-8", LANG = "en_CA.UTF-8" are supported and installed on your system. perl: warning: Falling back to the standard locale ("C"). P: Writing config for vmlinuz-6.6.5-starfive... P: Updating /boot/extlinux/extlinux.conf... root@lvision-MS-7C60:/#
root@lvision-MS-7C60:~# systemctl mask sleep.target suspend.target hibernate.target hybrid-sleep.target ⚠️ /proc/ is not mounted. This is not a supported mode of operation. Please fix your invocation environment to mount /proc/ and /sys/ properly. Proceeding anyway. Your mileage may vary. Created symlink /etc/systemd/system/sleep.target → /dev/null. Created symlink /etc/systemd/system/suspend.target → /dev/null. Created symlink /etc/systemd/system/hibernate.target → /dev/null. Created symlink /etc/systemd/system/hybrid-sleep.target → /dev/null. root@lvision-MS-7C60:/etc/init.d# cd ~ root@lvision-MS-7C60:~#
Sketch uses 321804 bytes (3%) of program storage space. Maximum is 8388608 bytes. [INFO] ANSI colors not used [INFO] COM Port Selected Manually: /dev/ttyUSB0 [INFO] Default baudrate is 115200 , later it may be changed to the value you set. [INFO] Trying to Enter the ISP Mode... * [INFO] Greeting Message Detected, Start Downloading ISP
➜ ~ ll /dev/ttyUSB* crw-rw---- 1 root dialout 188, 0 Jan 21 03:42 /dev/ttyUSB0 crw-rw---- 1 root dialout 188, 1 Jan 21 03:59 /dev/ttyUSB1 ➜ ~ sudo /home/lvision/.local/bin/kflash -p /dev/ttyUSB0 -b 115200 -n --verbose dummy.bin [INFO] ANSI colors not used [INFO] COM Port Selected Manually: /dev/ttyUSB0 [INFO] Default baudrate is 115200 , later it may be changed to the value you set. [INFO] Trying to Enter the ISP Mode... ._ [INFO] Automatically detected goE/kd233/bit_mic
[INFO] Greeting Message Detected, Start Downloading ISP Downloading ISP: |=======================================================================================================================================================================================================================| 100.0% 10kiB/s [INFO] Booting From 0x80000000 [INFO] Wait For 0.1 second for ISP to Boot [INFO] Boot to Flashmode Successfully [INFO] Selected Flash: On-Board [INFO] Initialization flash Successfully [INFO] Flash mode: DIO, Dual SPI serial throughput rates reach around 20 Mbps Programming BIN: |=======================================================================================================================================================================================================================| 100.0% [INFO] Rebooting... [INFO] The ISP stub tells us the k210 is rebooting ... ➜ ~ esptool --port /dev/ttyUSB1 flash-id esptool v5.2.dev2 Connected to ESP32 on /dev/ttyUSB1: Chip type: ESP32-D0WDQ6 (revision v1.0) Features: Wi-Fi, BT, Dual Core + LP Core, 240MHz, Vref calibration in eFuse, Coding Scheme None Crystal frequency: 40MHz MAC: 94:b5:55:22:87:44
Stub flasher running.
Flash Memory Information: ========================= Manufacturer: 5e Device: 4016 Detected flash size: 4MB Flash voltage set by a strapping pin: 3.3V
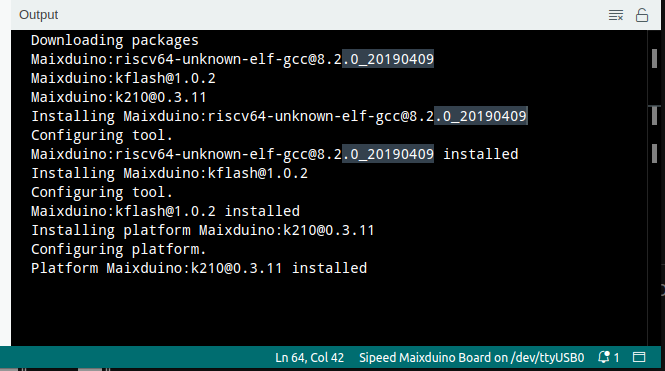
Typically, there’s no need to rebuild your project from the ground up. Instead, simply enter the Maixduino package URL in the Additional Boards Manager URLs section.
However, when needed, Maixduino Github repository offers open-source resource that you can utilize as a foundation for further development.
The W cse475 course from the University of Washington provides comprehensive course content, serving as an excellent tutorial for those interested in following along.
Highlight: MUST add the following two lines and useBurn Baudo Rate “500 kbps”
Sketch uses 95791 bytes (1%) of program storage space. Maximum is 8388608 bytes. [INFO] ANSI colors not used [INFO] COM Port Selected Manually: /dev/ttyUSB0 [INFO] Default baudrate is 115200 , later it may be changed to the value you set. [INFO] Trying to Enter the ISP Mode... * [INFO] Greeting Message Detected, Start Downloading ISP
~/.arduino15/packages/Maixduino/hardware/k210/0.3.11/libraries/Adafruit_BusIO/Adafruit_I2CDevice.cpp: In member function 'void Adafruit_I2CDevice::end()': ~/.arduino15/packages/Maixduino/hardware/k210/0.3.11/libraries/Adafruit_BusIO/Adafruit_I2CDevice.cpp:52:10: error: 'class TwoWire' has no member named 'end'; did you mean 'read'? _wire->end(); ^~~ read
Sketch uses 161412 bytes (1%) of program storage space. Maximum is 8388608 bytes. [INFO] ANSI colors not used [INFO] COM Port Selected Manually: /dev/ttyUSB0 [INFO] Default baudrate is 115200 , later it may be changed to the value you set. [INFO] Trying to Enter the ISP Mode... * [INFO] Greeting Message Detected, Start Downloading ISP
Sketch uses 322004 bytes (3%) of program storage space. Maximum is 8388608 bytes. [INFO] ANSI colors not used [INFO] COM Port Selected Manually: /dev/ttyUSB0 [INFO] Default baudrate is 115200 , later it may be changed to the value you set. [INFO] Trying to Enter the ISP Mode... * [INFO] Greeting Message Detected, Start Downloading ISP
➜ qorc-sdk git:(master) ✗ qfprog --port=/dev/ttyACM0 --bootfpga ./qf_apps/quickfeather-initial-binaries/qf_bootfpga.bin CLI mode ports = ['/dev/ttyACM0 (QuickFeather)'] 1 Using port /dev/ttyACM0 (QuickFeather) Programming FPGA image used during programming ./qf_apps/quickfeather-initial-binaries/qf_bootfpga.bin Erasing designated flash pages Erase 64.0 KiB ( 0xd8 ) at 0x20000 Erase 4.0 KiB ( 0x20 ) at 0x30000 Erase 4.0 KiB ( 0x20 ) at 0x31000 Erase 4.0 KiB ( 0x20 ) at 0x32000 Writing binary Write 75960 bytes [XXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXX] Verifying binary FastREAD 0x0B ( 75960 ) [XXXXXXXXXXXXXXXXXXXXXXXXXXXXTraceback (most recent call last): File "/opt/TinyFPGA-Programmer-Application/tinyfpga-programmer-gui.py", line 206, in program fpga.program_bitstream(addr, bitstream, "binary") File "/opt/TinyFPGA-Programmer-Application/q-series/python/tinyfpgaq.py", line 311, in program_bitstream if self.program(addr, bitstream, what): File "/opt/TinyFPGA-Programmer-Application/q-series/python/tinyfpgaq.py", line 237, in program read_back = self.read(addr, len(data)) File "/opt/TinyFPGA-Programmer-Application/q-series/python/tinyfpgaq.py", line 72, in read data += self.cmd(0x0b, addr, b'\x00', read_len=read_length) File "/opt/TinyFPGA-Programmer-Application/q-series/python/tinyfpgaq.py", line 45, in cmd response = self.ser.read(read_len) File "~/.local/lib/python3.10/site-packages/serial/serialposix.py", line 595, in read raise SerialException( serial.serialutil.SerialException: device reports readiness to read but returned no data (device disconnected or multiple access on port?) Writing metadata Erasing designated flash pages Traceback (most recent call last): File "~/.local/lib/python3.10/site-packages/serial/serialposix.py", line 621, in write n = os.write(self.fd, d) OSError: [Errno 5] Input/output error
During handling of the above exception, another exception occurred:
Traceback (most recent call last): File "/opt/TinyFPGA-Programmer-Application/tinyfpga-programmer-gui.py", line 218, in program fpga.program_bitstream(meta_addr, meta_bitstream, "metadata") File "/opt/TinyFPGA-Programmer-Application/q-series/python/tinyfpgaq.py", line 311, in program_bitstream if self.program(addr, bitstream, what): File "/opt/TinyFPGA-Programmer-Application/q-series/python/tinyfpgaq.py", line 229, in program self.quick_erase(addr, len(data)) File "/opt/TinyFPGA-Programmer-Application/q-series/python/tinyfpgaq.py", line 179, in quick_erase self._erase(start_addr, 0x1000) File "/opt/TinyFPGA-Programmer-Application/q-series/python/tinyfpgaq.py", line 108, in _erase self.write_enable() File "/opt/TinyFPGA-Programmer-Application/q-series/python/tinyfpgaq.py", line 86, in write_enable self.cmd(0x06) File "/opt/TinyFPGA-Programmer-Application/q-series/python/tinyfpgaq.py", line 43, in cmd self.ser.write(bytearray(cmd_write_string)) File "~/.local/lib/python3.10/site-packages/serial/serialposix.py", line 655, in write raise SerialException('write failed: {}'.format(e)) serial.serialutil.SerialException: write failed: [Errno 5] Input/output error
2.2.3 Bricked
Unfortunately, my QuickFeather is bricked. Whenever reset or even entering user mode, the LED on QuickFeather turns to red in the end.
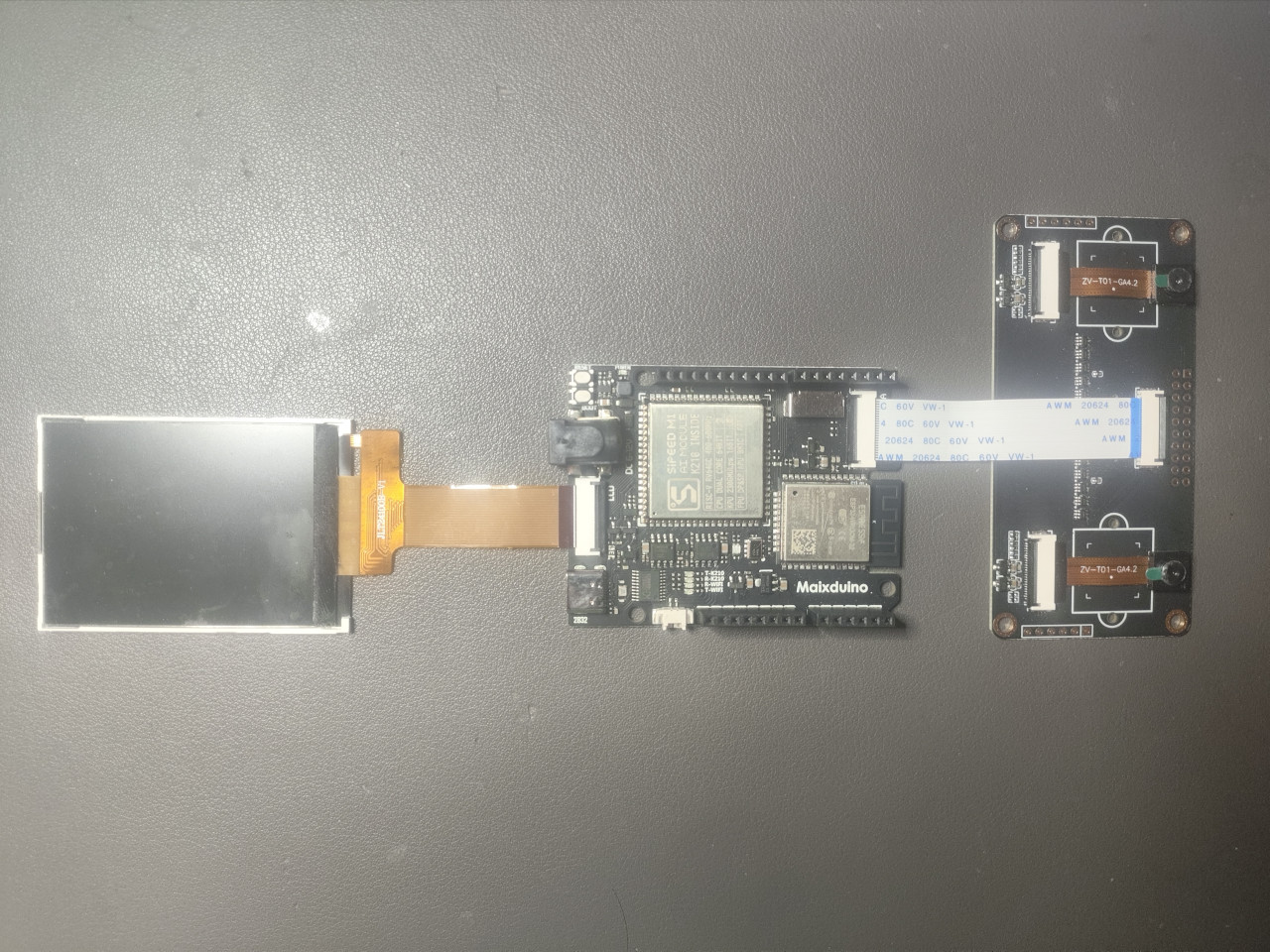
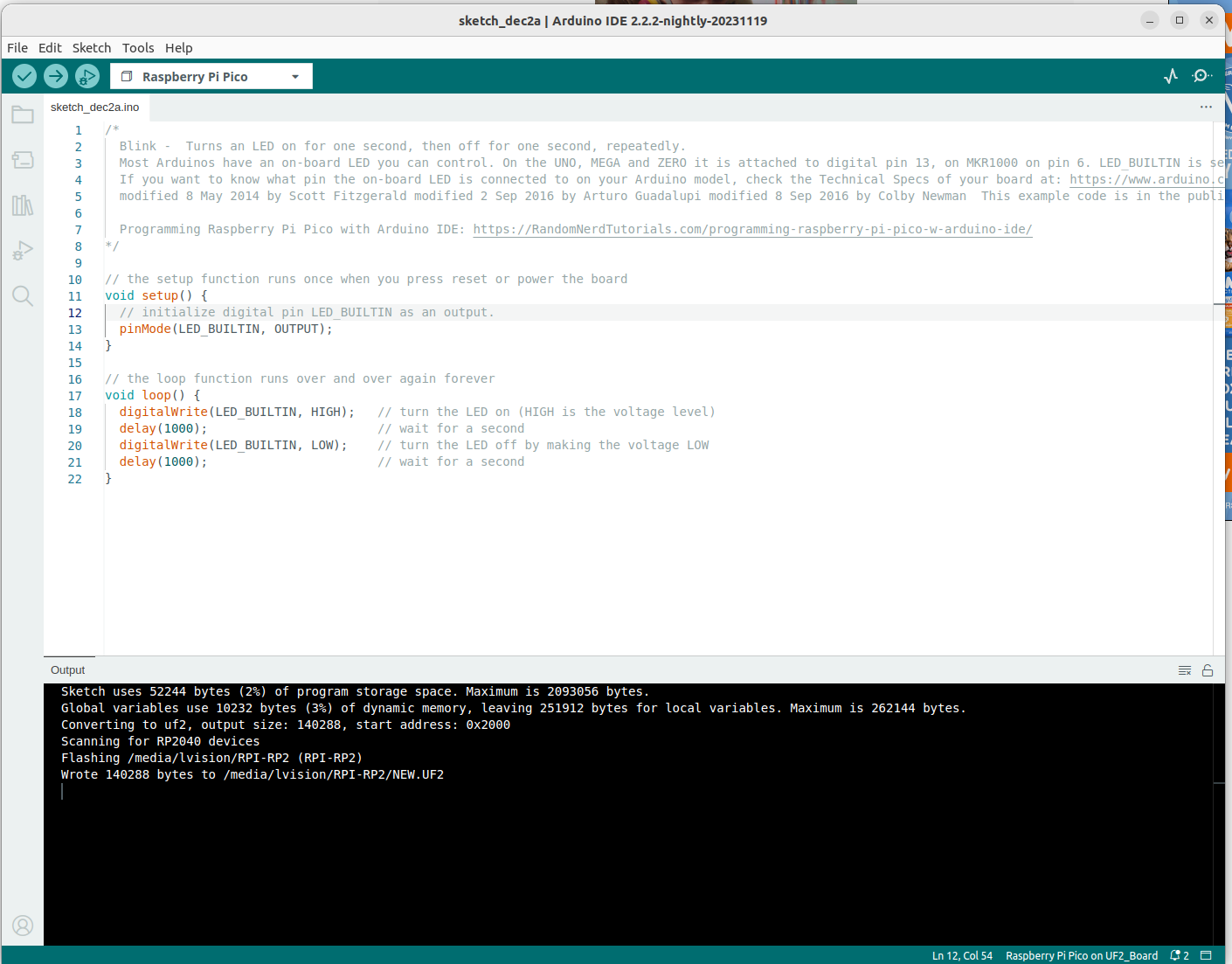
In my test, no matter MicroPython Download RPI_PICO is dragged-and-dropped, or a customized program is uploaded via Arduino IDE as in the following picture:
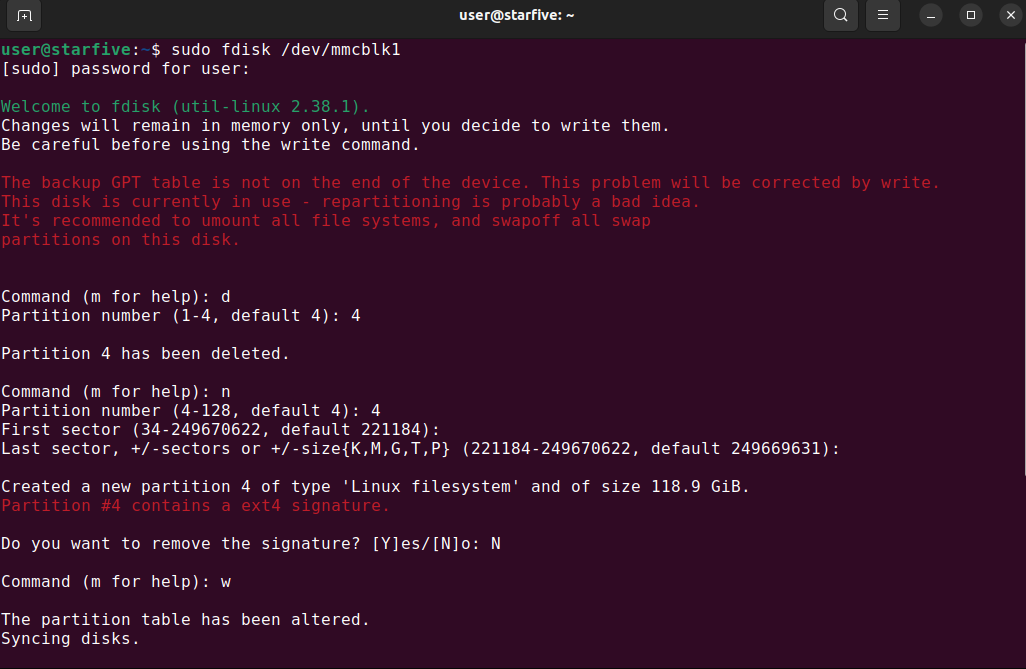
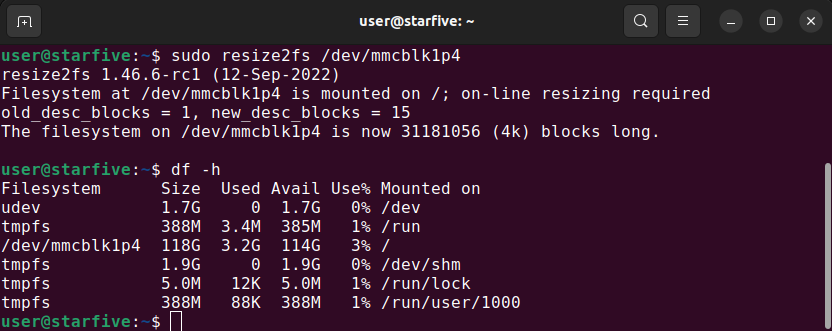
I got the solution from my posted issue Boot from eMMC or NVME? Existing Doubts on the official RVspace forum. The solution is just hidden in the file /boot/extlinux/extlinux.conf. Well, to modify this file correspondingly, you need to:
mount /boot using sudo mount /dev/sdc3 /mnt
take a look at the file /boot/extlinux/extlinux.conf
➜ extlinux cat extlinux.conf ## /extlinux/extlinux.conf ## ## IMPORTANT WARNING ## ## The configuration of this file is generated automatically. ## Do not edit this file manually, use: u-boot-update
default l1 menu title U-Boot menu prompt 0 timeout 50
label l1r menu label Debian GNU/Linux bookworm/sid 5.15.0-starfive (rescue target) linux /vmlinuz-5.15.0-starfive initrd /initrd.img-5.15.0-starfive fdtdir /dtbs append root=/dev/nvme0n1p4 rw console=tty0 console=ttyS0,115200 earlycon rootwait stmmaceth=chain_mode:1 selinux=0 single
Now, I’m able to boot from both SD card or NVME, however, there seems to be NO such a thing similar to grub? And I’ll have to manually edit the value of default l1 accordingly whenever I want to boot from a different device.
Anyway, I’ve got to stop here for now. I’ll talk about how to build a fresh distro for VisionFive2 from scratch in my next post.

![Simulation with [GTKWave]](https://raw.githubusercontent.com/LongerVision/Resource/master/fpga/iCEstick/apio_sim_gtkwave.png) ](
](