Happened to come across a blog XGBoost vs LightGBM: How Are They Different. Let’s investigate a bit wider and deeper into the following 4 machine learning open source packages.
It’s been over a year and a half for JeVois to have this second generation of smart camera JeVois Pro. Although JeVois failed to pledge its campaine goal on Kickstarter, it’s still my great pleasure to give it a try. Again: JeVois Pro is made of China.
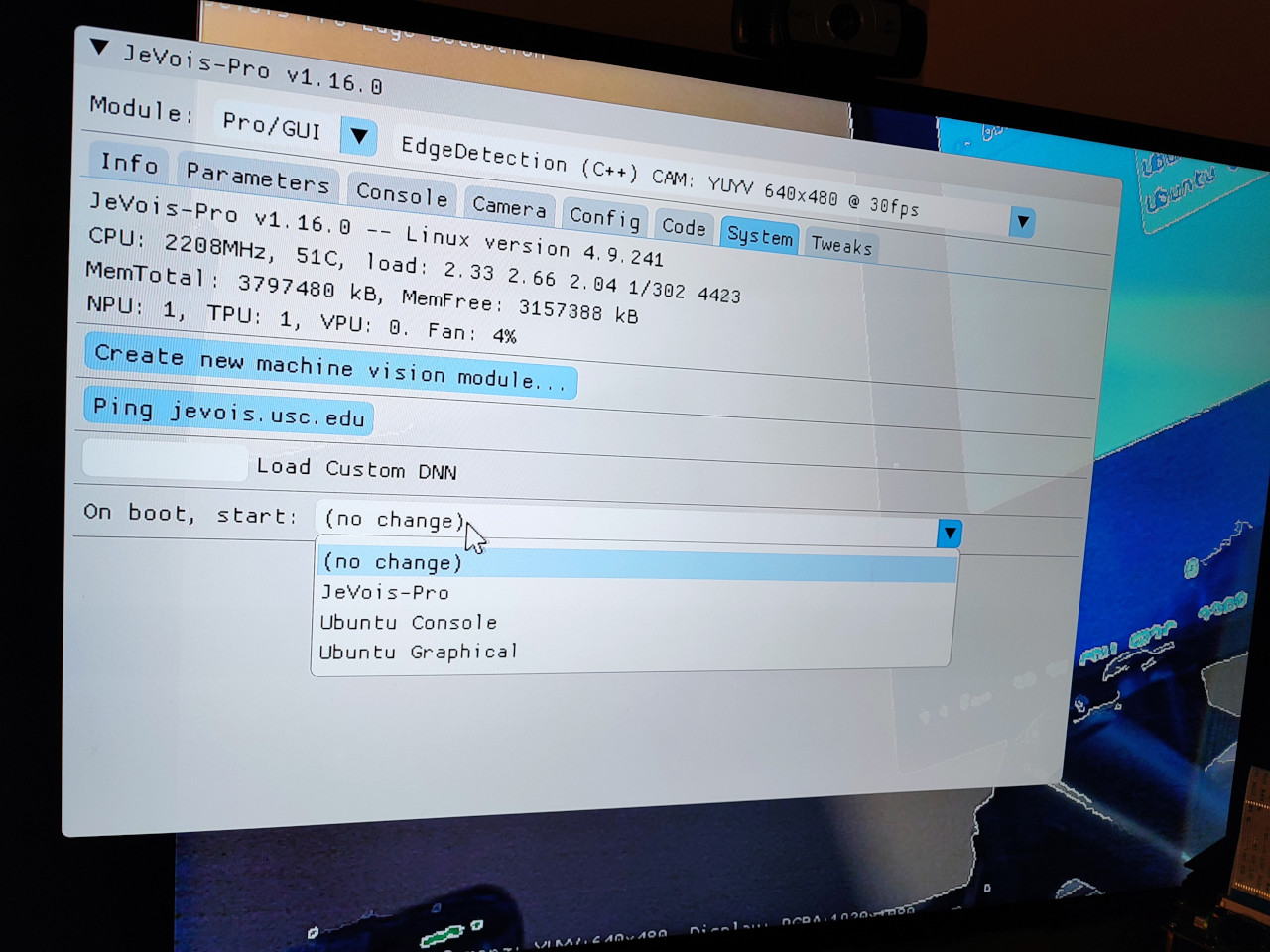
Now, let’s follow the Quick Start and take a test of JeVois Pro. After successfully flashing the TF card, let’s boot up JeVois Pro, For the first booting, it’s better we connect both HDMI and keyboard and mouse.
For my convenience of setting up the network, I chose Ubuntu Graphical. And, now it’s the time for us to plug in our Wifi dongle/module before rebooting. Then, reboot.
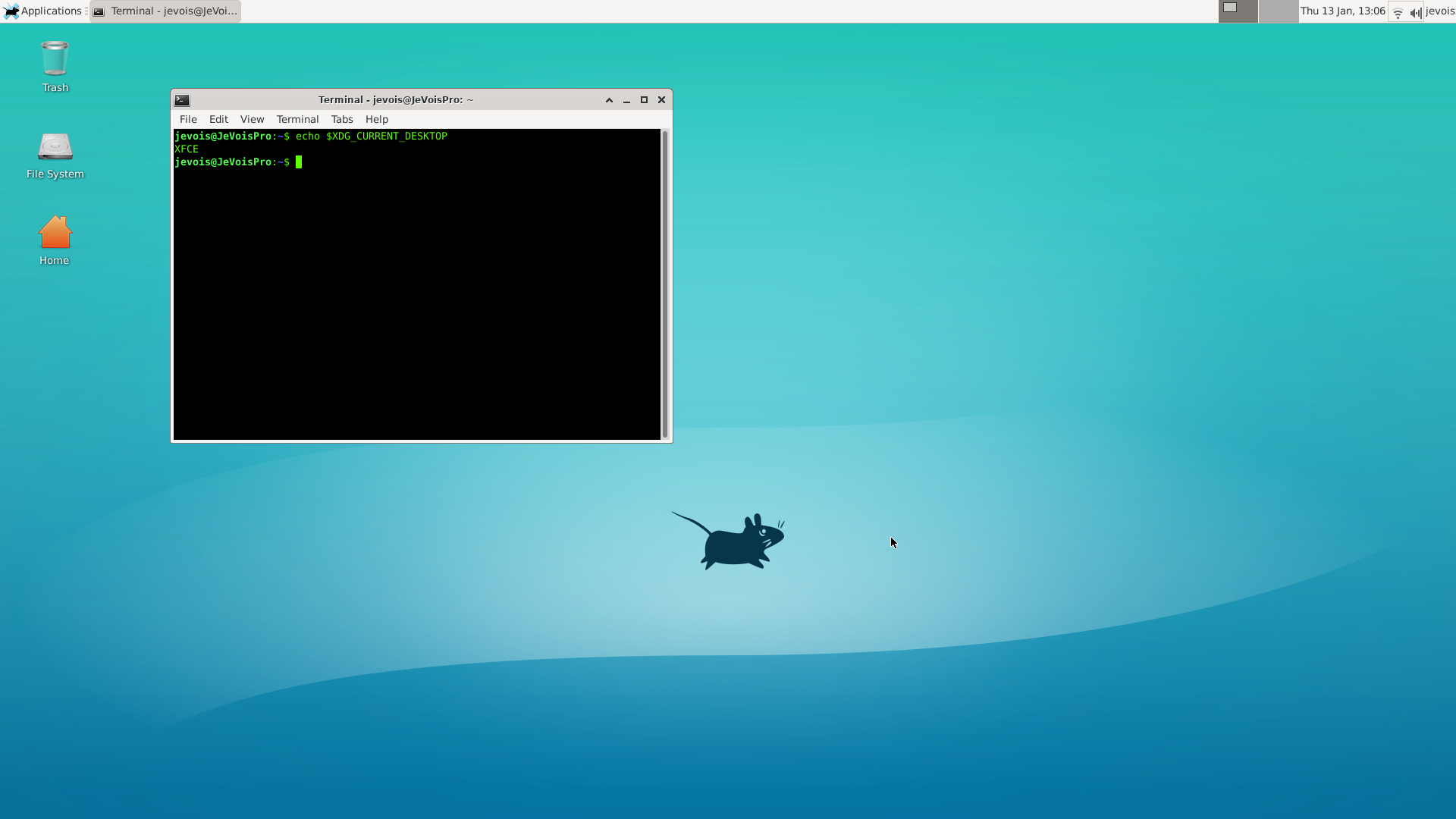
Clearly, JeVois Pro‘s Ubuntu Graphical comes with GUI XFCE.
➜ ~ ssh jevois@192.168.1.78 The authenticity of host '192.168.1.78 (192.168.1.78)' can't be established. ECDSA key fingerprint is SHA256:JS0C5IOYk3dkPj8s5U/7QGvtswZowO5+QfpFJNMfBfE. Are you sure you want to continue connecting (yes/no/[fingerprint])? yes Warning: Permanently added '192.168.1.78' (ECDSA) to the list of known hosts. jevois@192.168.1.78's password:
According to my Email to JeVois Inc. and their reply, JeVois Pro hasn’t implemented the video streaming part yet. Clearly, two streams are needed to be transferred via Wifi:
Merry Christmas everyone. It is another Christmas, Year 2022 is coming. I’m back to life. Last week, my JetBot arrived. It took me a couple of hours to make it work, and round 1 week to demonstrate: some of the JetBot Examples are NOT working properly. Anyway, my son Fionn is half-year old. Let’s celebrate it with JetBot, as well as the heavy Christmas snows.
Christmas Snow
My Son
Snow
I believe we can flash JetPack first and have JetBot configured afterwards. Let’s leave this topic for the next blog The JeBot - 2. In this blog, we’re going to follow the official JetBot Software Setup.
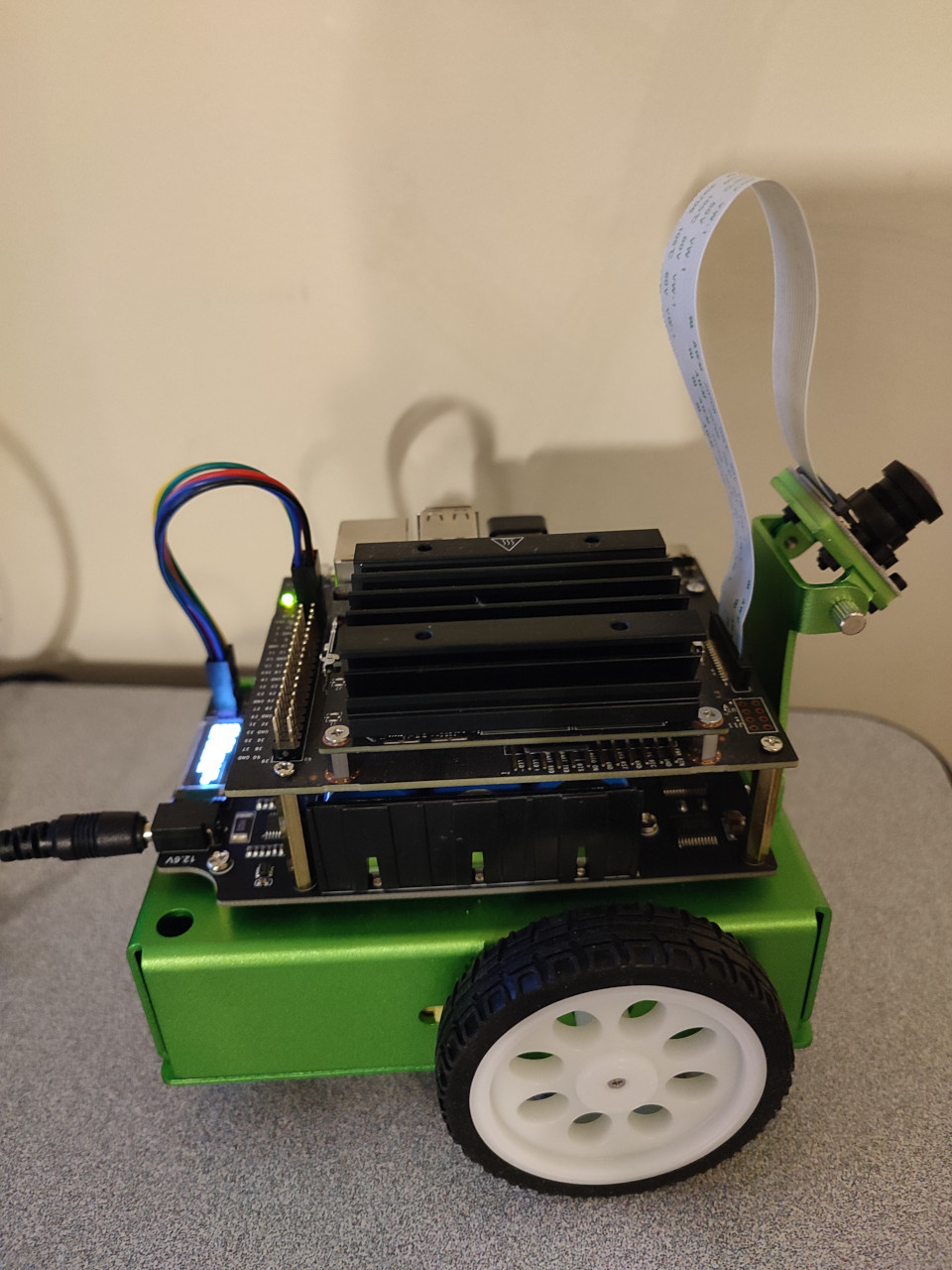
As you can see, there is NO antenna. Instead, a Wifi USB dongle is provided. Actully, there are a couple things to be emphasized for my Waveshare JetBot 2GB AI Kit:
No antenna, ONLY a Wifi USB dongle
A 64G TF Card is adopted. A comprehensive overview of SD card is summarized at SD Standard Overview.
➜ jetbot sudo dd bs=1M if=jetbot-043_nano-2gb-jp45.img of=/dev/mmcblk0 conv=fsync [sudo] password for lvision: 24679+1 records in 24679+1 records out 25877824000 bytes (26 GB, 24 GiB) copied, 1002.99 s, 25.8 MB/s
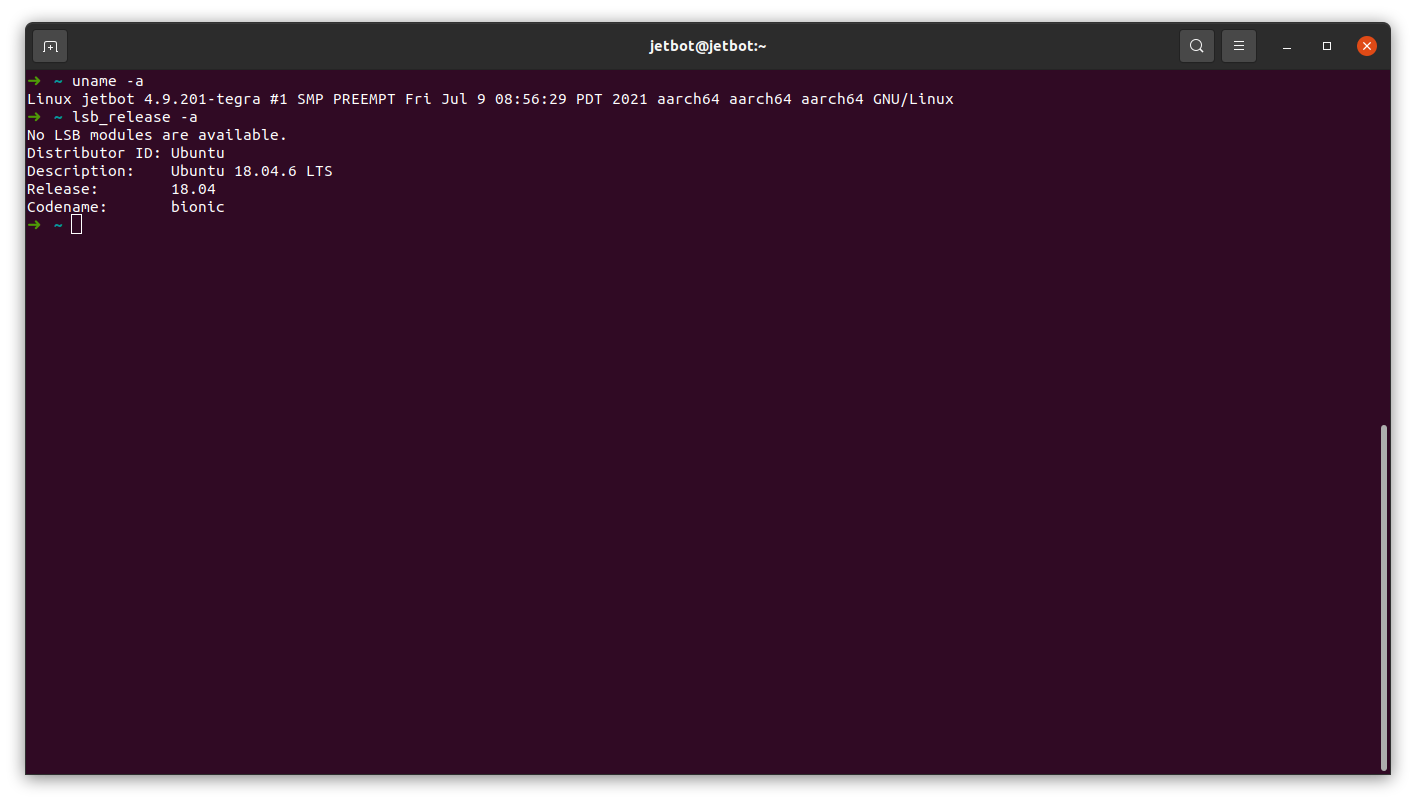
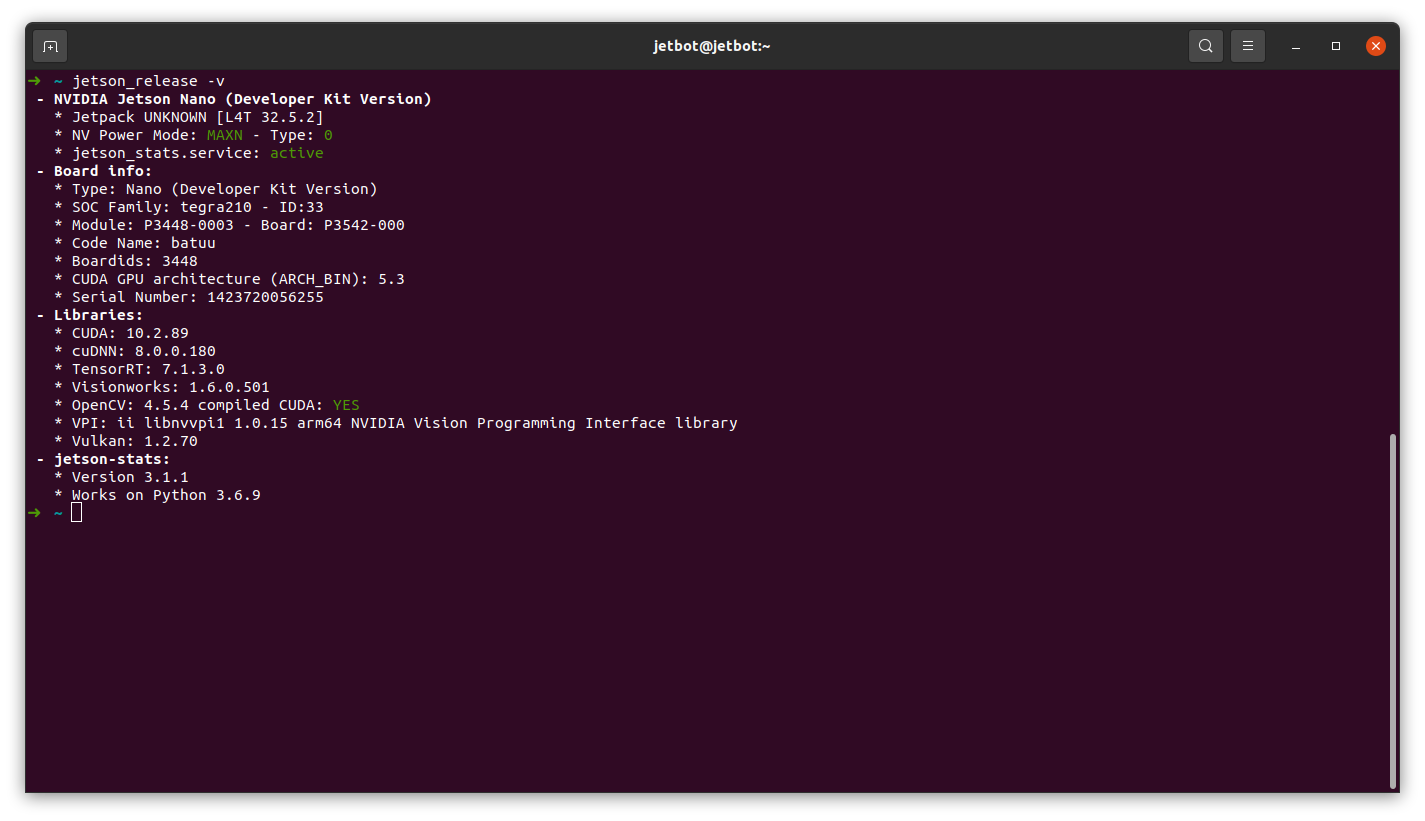
After that, as usual, we upgrade the entire JetBot system by sudo apt update and sudo apt upgrade. After all these, our JetBot looks like:
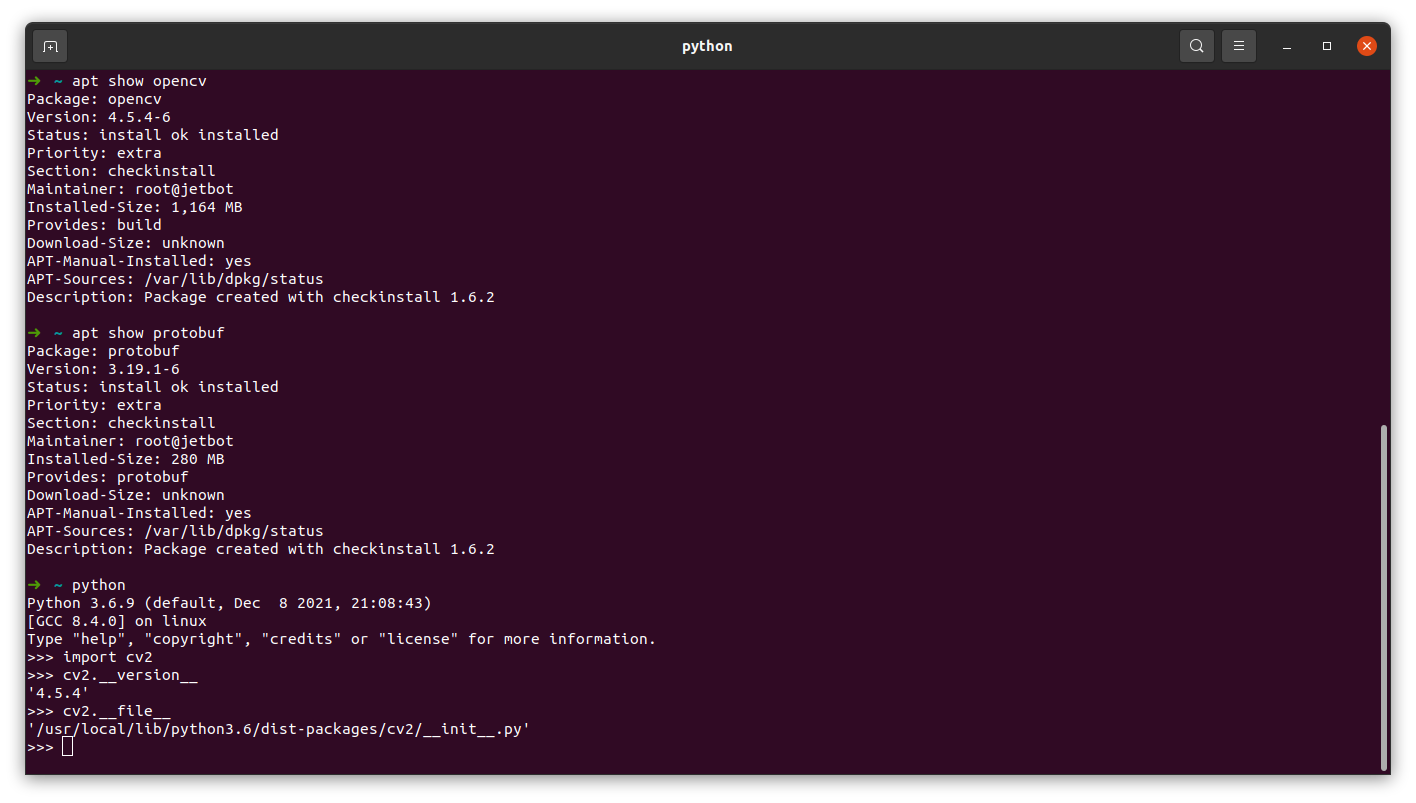
2.2 Change from using Python 2 to Python 3
1 2 3 4 5 6 7 8 9 10 11 12 13 14
➜ ~ python --version Python 3.6.9 ➜ ~ pip --version whereis WARNING: pip is being invoked by an old script wrapper. This will fail in a future version of pip. Please see https://github.com/pypa/pip/issues/5599 for advice on fixing the underlying issue. To avoid this problem you can invoke Python with '-m pip' instead of running pip directly. pip 21.3.1 from /home/jetbot/.local/lib/python3.6/site-packages/pip (python 3.6) ➜ ~ whereis pip pip: /usr/bin/pip /home/jetbot/.local/bin/pip3.6 /home/jetbot/.local/bin/pip ➜ ~ ll /usr/bin/pip lrwxrwxrwx 1 root root 27 Dec 22 12:46 /usr/bin/pip -> /home/jetbot/.local/bin/pip ➜ ~ python -m pip --version pip 21.3.1 from /home/jetbot/.local/lib/python3.6/site-packages/pip (python 3.6) ➜ ~
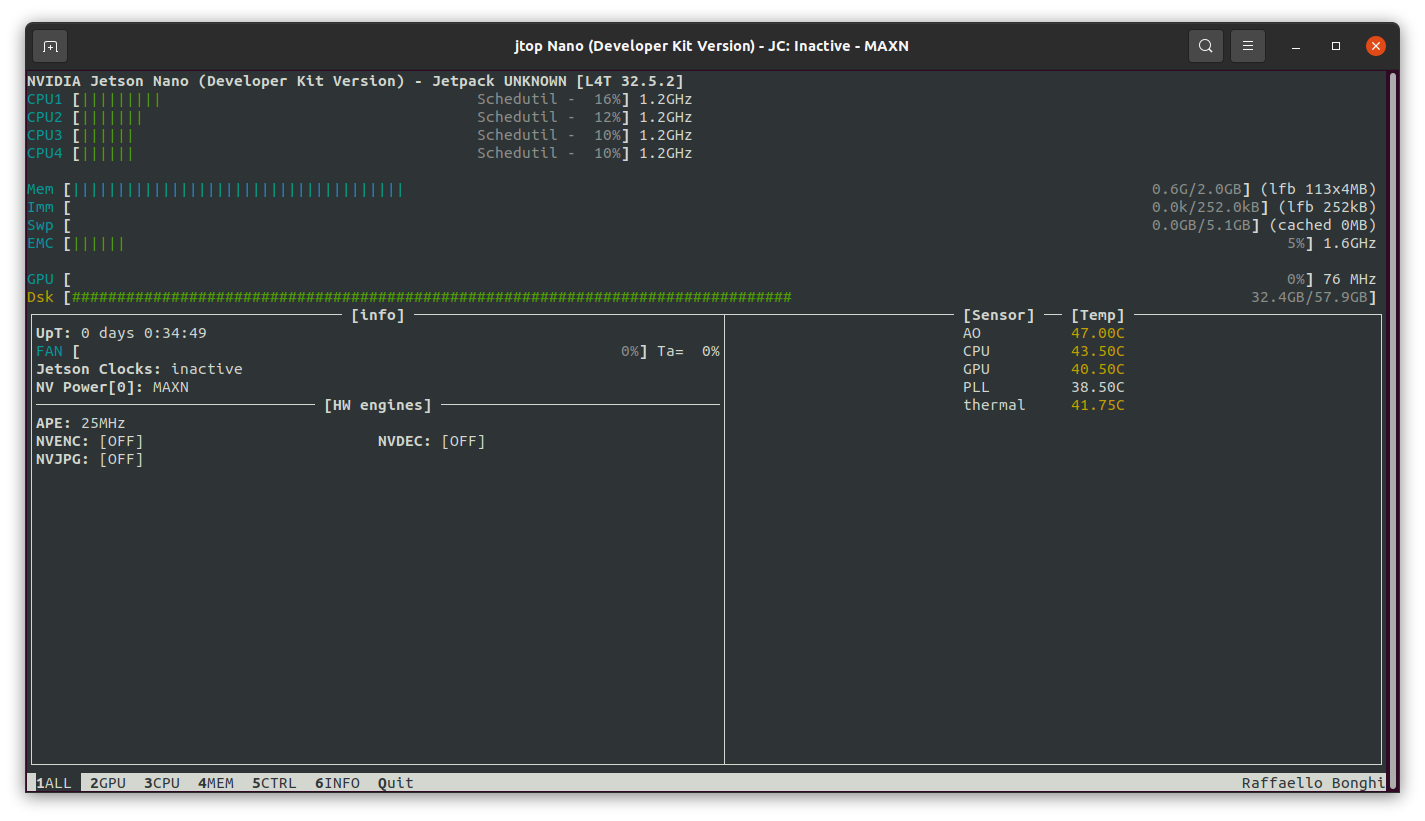
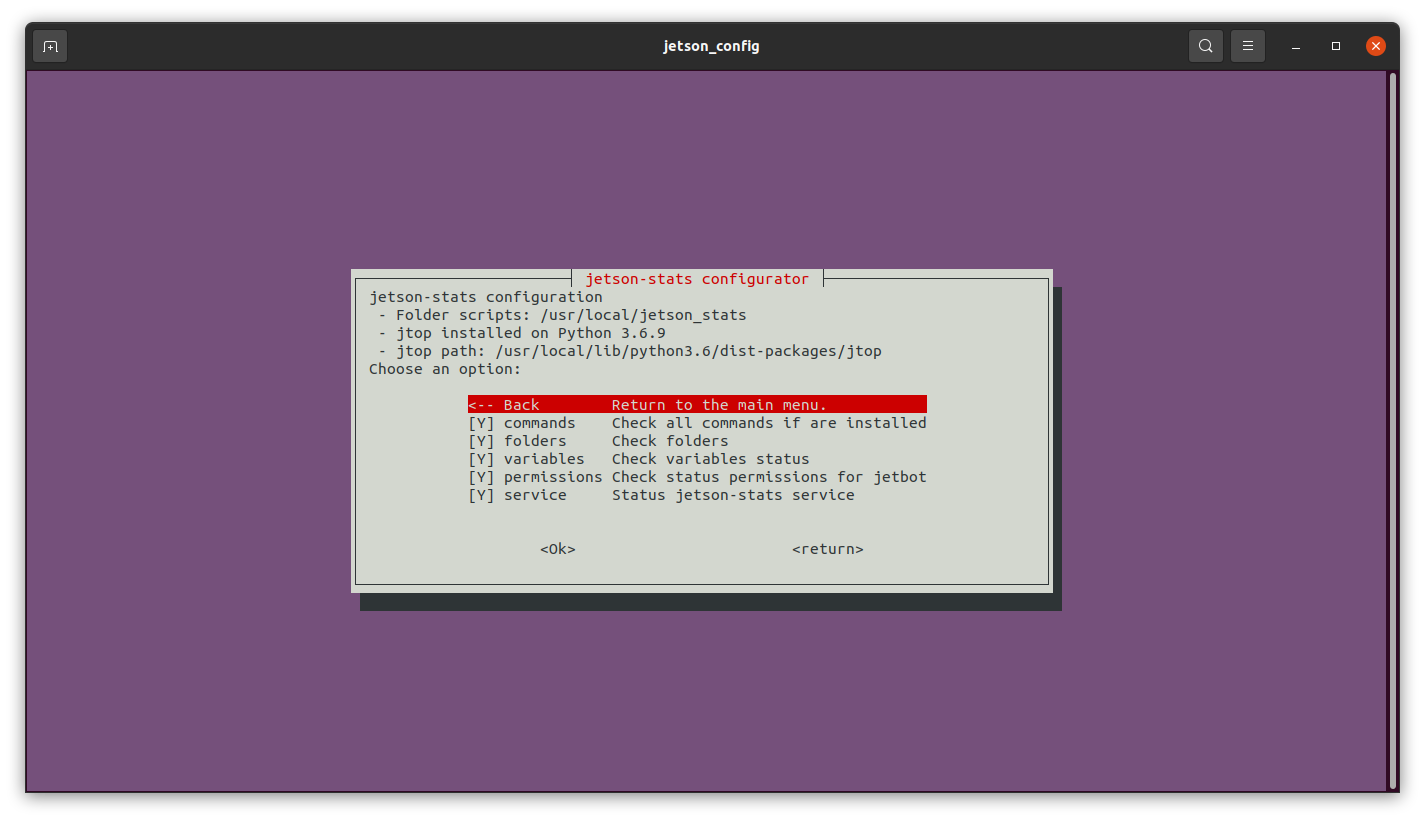
After twickling around how to run pip under /home/jetbot/.local/bin for user root, and have Jetson Stats installed using this command sudo -H pip install -U jetson-stats, we got the following results:
It looks that by directly installing pytorch via pip install torch -U --user, a second libgomp will be installed. Both libgomps brought me the error of cannot allocate memory in static TLS block, please refer to:
JetBot Basic Motion Demo is really a very cool demo for you to start with JetBot. It wouldn’t be hard for you to run a Jupyter Notebook Server remotely. Anyway, my testing results are given as follows: a headache video, as well as .pdf summary.