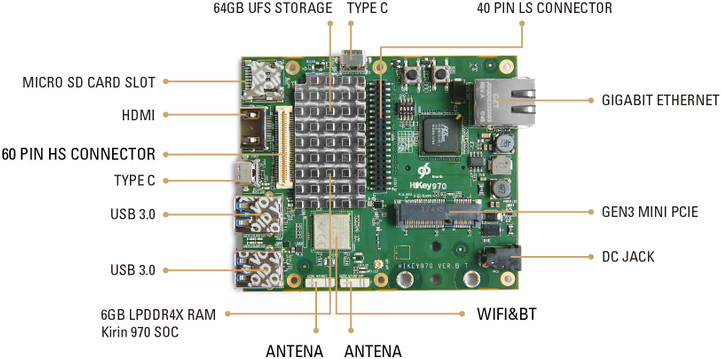
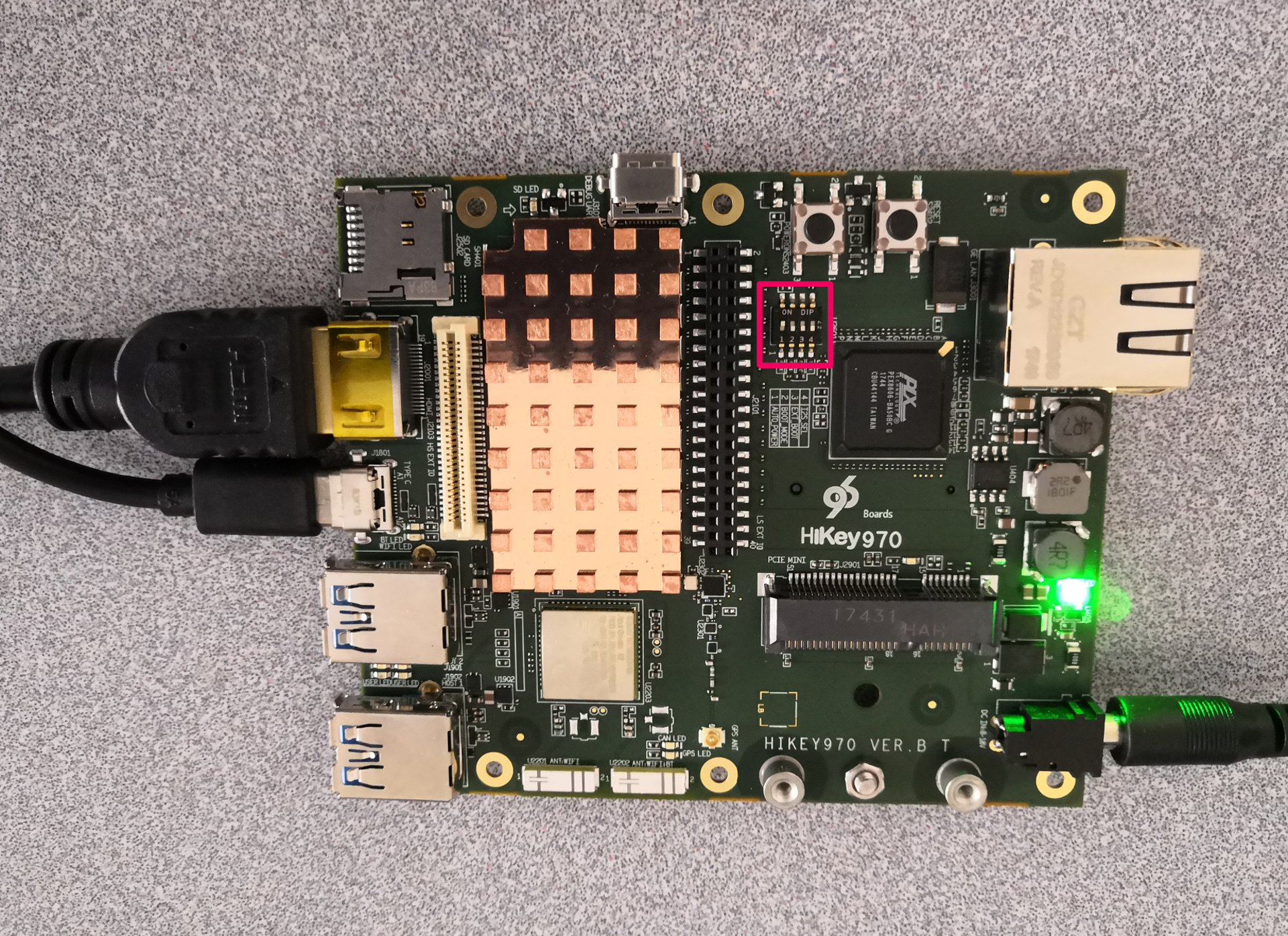
Hi, everyone… I’ve been so busy and haven’t written anything for a bit. My previous boss at Lenovo is now in Vancouver for annual executive meeting. She brought me a HuaweiHiSiliconHikey 970.
Several things before testing:
Lenovo and Huawei are two BIGGEST and possibly BEST IT companies from China.
HiSilicon is a chip design and manufacturing company spinned off from Huawei.
96Boards hosts various SBCs (Single Board Computers), including Hikey 970.
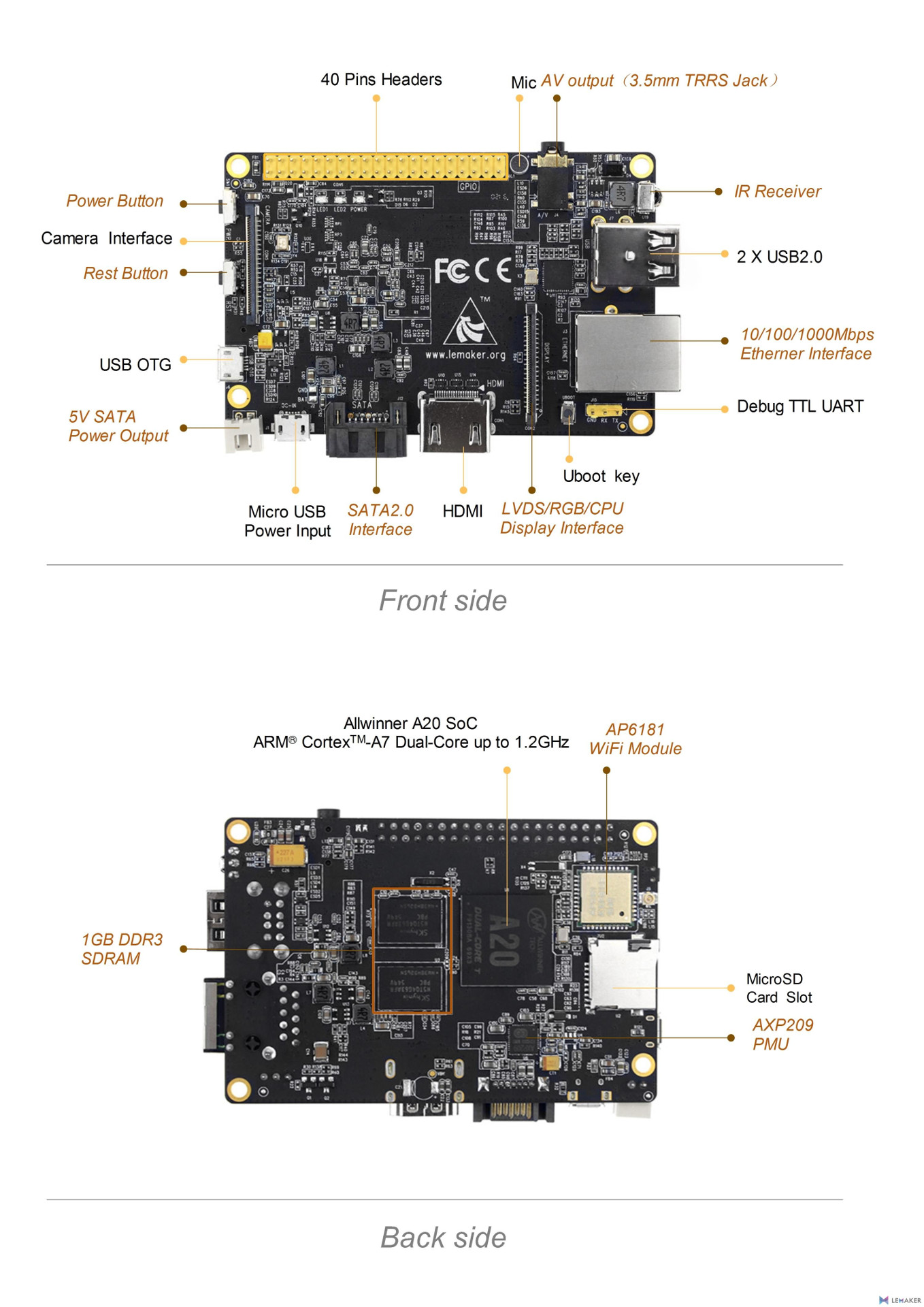
A lot more resource can be found on LeMaker, who has designed several low-cost single board computers (SBCs).
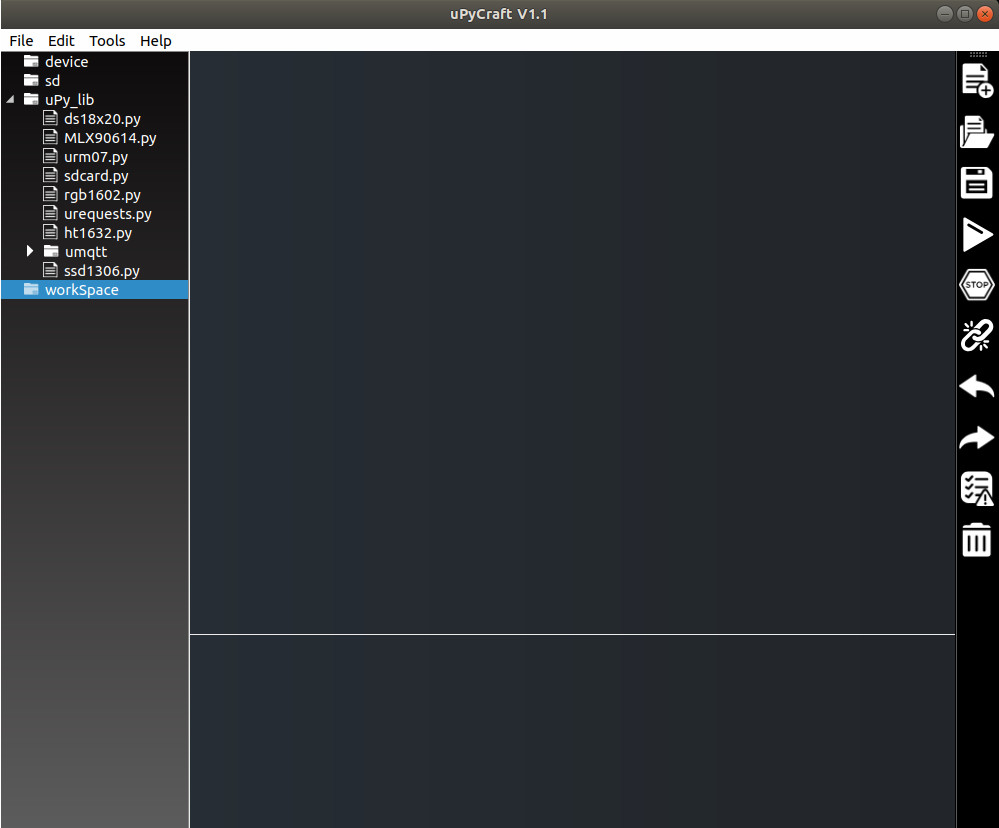
However, it seems Linux support for uPyCraft is NOT very good. My working environment:
1 2 3 4 5 6 7 8 9 10 11 12 13
$ lsb_release -a No LSB modules are available. Distributor ID: Ubuntu Description: Ubuntu 18.04.1 LTS Release: 18.04 Codename: bionic $ uname -a Linux jiapei-GT72-6QE 4.18.7-041807-generic #201809090930 SMP Sun Sep 9 09:33:16 UTC 2018 x86_64 x86_64 x86_64 GNU/Linux $ python --version Python 3.6.5 $ qmake --version QMake version 3.1 Using Qt version 5.11.1 in /opt/Qt/Current/gcc_64/lib
PART A: Test Built uPyCraft
1. Try the Executable
In fact, there is one executable Linux version for uPyCraft. However, to run it after downloading, I obtained the following ERROR messages:
1 2 3 4 5 6
$ ./uPyCraft_linux_V1.0 Traceback (most recent call last): File "uPyCraft.py", line 2, in <module> File "/usr/local/lib/python3.5/dist-packages/PyInstaller/loader/pyimod03_importers.py", line 714, in load_module ImportError: /tmp/_MEIoq8Xi8/libz.so.1: version `ZLIB_1.2.9' not found (required by /usr/lib/x86_64-linux-gnu/libpng16.so.16) [324] Failed to execute script uPyCraft
It’s been quite a while before I write down this similar blog as my previous Single Board Computer blogs. Banana Pi Pro is a SBC with AllWinner A20 ARM CPU, which is also just of card size (Cited from LeMaker Official website).
PART A: Install Ubuntu Desktop Built By Armbian onto Banana Pi Pro
1. Download Armbian Ubuntu Desktop for Banana Pi Pro
We FIRST go visiting the website https://www.armbian.com/banana-pi-pro/ and click Armbian Bionic icon, a file named Armbian_5.59_Bananapipro_Ubuntu_bionic_next_4.14.65.7z will be automatically downloaded.
2. Install Armbian Ubuntu Desktop for Banana Pi Pro
After the extracted image file is prepared, it’s the time to install the Armbian Ubuntu Desktop onto our TF card. We FIRST format the TF card:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17
$ sudo umount /dev/mmcblk0p1 [sudo] password for jiapei: $ sudo mkfs.ext4 /dev/mmcblk0 mke2fs 1.44.1 (24-Mar-2018) Found a dos partition table in /dev/mmcblk0 Proceed anyway? (y,N) y Discarding device blocks: done Creating filesystem with 7791744 4k blocks and 1949696 inodes Filesystem UUID: 4e7bb315-0db1-4b62-a9d5-40c0ba78c7f0 Superblock backups stored on blocks: 32768, 98304, 163840, 229376, 294912, 819200, 884736, 1605632, 2654208, 4096000
Allocating group tables: done Writing inode tables: done Creating journal (32768 blocks): done Writing superblocks and filesystem accounting information: done
Afterwards, use dd to install the downloaded Armbian Ubuntu Desktop image.
1 2 3 4 5
$ cd Armbian_5.59_Bananapipro_Ubuntu_bionic_next_4.14.65/ $ sudodd bs=4M if=Armbian_5.59_Bananapipro_Ubuntu_bionic_next_4.14.65.img of=/dev/mmcblk0 conv=fsync 211+0 records in 211+0 records out 884998144 bytes (885 MB, 844 MiB) copied, 123.525 s, 7.2 MB/s
PART B: Boot Into Armbian, Network Configuration, Locale Configuration and Armbian Upgrading
NOTE: Whenever you met some unsolvable issue after you boot into Armbian, please use the command armbianmonitor -U to log the issue.
1. Boot Into Armbian
We now unplug the TF card from the host and put it into the Banana Pi Pro board, Armbian Ubuntu Desktop boots successfully. The default username and password are respectively: root and 1234.
1 2 3 4 5 6 7 8 9 10
Ubuntu 18.04.1 LTS bananapipro tty1
bananapipro login: root password: You are required to change your password immediately (root enforced) Changing password for root. (current) UNIX password: Enter new UNIX password: Retype new UNIX password: ...
And, for the FIRST boot, we’ll be asked to create a NEW user besides root:
Creating a new user account. Press <Ctrl-C> to abort
Please provide a username (eg. your forename): bananapipro Trying to add user bananapipro Adding user 'bananapipro' ... Adding new group 'bananapipro' (1000) ... Adding new user 'bananapipro' (1000) with group 'bananapipro' ... Creating home directory '/home/bananapipro' ... Copying files from '/etc/ske1' ... Enter new UNIX password: Retype new UNIX password: passwd: password updated successfully Changing the user information for orangepiplus2 Eter the new value, or press ENTER for the default Full Name []: Room Number []: Work Phone []: Home Phone []: Other []: Is the information correct? [Y/n] Y
Dear bananapipro, your account bananapipro has been created and is sudo enabled. Please use this account for your daily work from now on. ...
Then, Banana Pi Pro now boots into text mode with account root.
1
root@bananapipro:~$
We may now re-login with the newly created account bananapipro:
bananapipro@bananapipro:~$ sudo vim /etc/network/interfaces source /etc/network/interfaces.d/* # Network is managed by Network manager auto lo iface lo inet loopback
Afterwards, a reboot (meanwhile, you may have to set up your own router for a fixed IP) will bring your Banana Pi Pro a fixed IP address. Here in my case: 192.168.0.82.
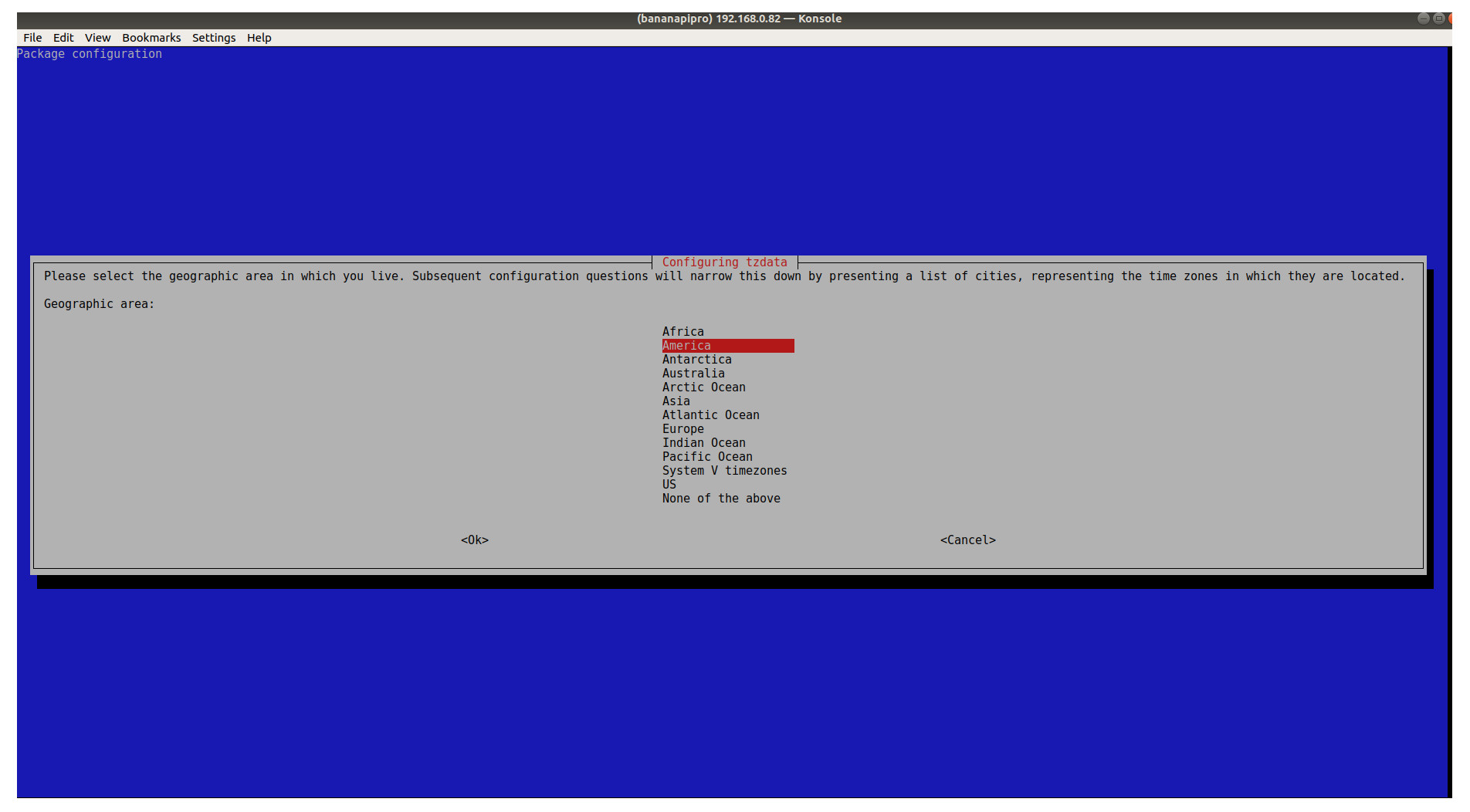
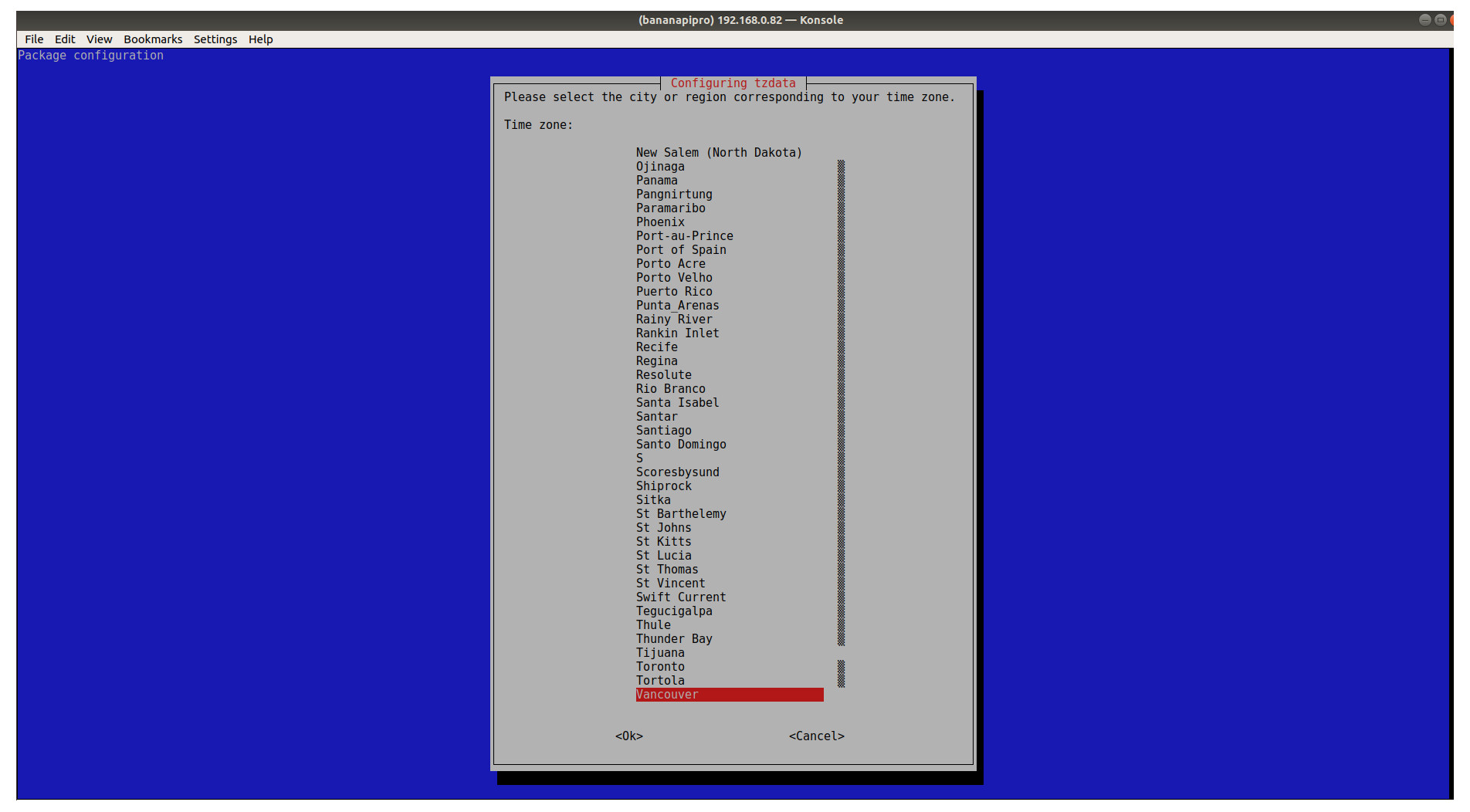
bananapipro@bananapipro:~$ sudo dpkg-reconfigure tzdata [sudo] password for bananapipro: perl: warning: Setting locale failed. perl: warning: Please check that your locale settings: LANGUAGE = "en_US.UTF-8", LC_ALL = (unset), LC_MEASUREMENT = "en_CA.UTF-8", LC_PAPER = "en_CA.UTF-8", LC_MONETARY = "en_CA.UTF-8", LC_NAME = "en_CA.UTF-8", LC_ADDRESS = "en_CA.UTF-8", LC_NUMERIC = "en_CA.UTF-8", LC_MESSAGES = "en_US.UTF-8", LC_TELEPHONE = "en_CA.UTF-8", LC_IDENTIFICATION = "en_CA.UTF-8", LC_TIME = "en_CA.UTF-8", LANG = "en_US.UTF-8" are supported and installed on your system. perl: warning: Falling back to a fallback locale ("en_US.UTF-8"). locale: Cannot set LC_ALL to default locale: No such file or directory /usr/bin/locale: Cannot set LC_ALL to default locale: No such file or directory
Current default time zone: 'America/Vancouver' Local time is now: Tue Sep 4 15:33:36 PDT 2018. Universal Time is now: Tue Sep 4 22:33:36 UTC 2018.
During the above process, you’ll set the following 2 pages correspondingly:
If we logout and login Banana Pi Pro again, we’ll see the timezone has been successfully reset.
Welcome to ARMBIAN 5.59 stable Ubuntu 18.04.1 LTS 4.14.65-sunxi System load: 0.16 0.20 0.18 Up time: 53 min Memory usage: 6 % of 992MB IP: 192.168.0.82 CPU temp: 46°C Usage of /: 3% of 29G
Last login: Tue Sep 4 14:58:03 2018 from 192.168.0.60
It seems Tensorflow evolves pretty fast. Today we are testing object tracking based on Tensorflow.
1. Environment
1 2 3 4 5 6 7 8 9 10
➜ ~ python Python 3.6.6 (default, Sep 12 2018, 18:26:19) [GCC 8.0.1 20180414 (experimental) [trunk revision 259383]] on linux Type "help", "copyright", "credits" or "license"for more information. >>> import tensorflow as tf >>> tf.__version__ '1.12.0-rc0' >>> import cv2 >>> cv2.__version__ '3.4.3'
2. Object Tracking
2.1 Concepts
There are several fundamental concepts to be re-emphasized (Here, we took one single concerned object as our example. There might be multiple concerned objects):
detection: You don’t know whethere there is a concerned object in the field of view or not, which you will know after the detection. And, if there is such a concerned object in the view, the object location is to be given.
tracking: You know where the concerned object was. Based on the prior knowledge, you are to determine where this object is going to be next?
location: Both detection and tracking are looked on as locating the concerned object.
recognition: Only after the concerned object has been located, more detailed information may be recognized afterwards.
$ lsb_release -a No LSB modules are available. Distributor ID: Ubuntu Description: Ubuntu 18.04 LTS Release: 18.04 Codename: bionic
1 2 3 4 5
$ gcc --version gcc (Ubuntu 7.3.0-16ubuntu3) 7.3.0 Copyright (C) 2017 Free Software Foundation, Inc. This is free software; see the sourcefor copying conditions. There is NO warranty; not even for MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE.
$ ./configure WARNING: An illegal reflective access operation has occurred WARNING: Illegal reflective access by com.google.protobuf.UnsafeUtil (file:~/.cache/bazel/_bazel_jiapei/install/ce085f519b017357185750fe457b4648/_embedded_binaries/A-server.jar) to field java.nio.Buffer.address WARNING: Please consider reporting this to the maintainers of com.google.protobuf.UnsafeUtil WARNING: Use --illegal-access=warn to enable warnings of further illegal reflective access operations WARNING: All illegal access operations will be denied in a future release WARNING: --batch mode is deprecated. Please instead explicitly shut down your Bazel server using the command"bazel shutdown". You have bazel 0.15.0 installed. Please specify the location of python. [Default is /usr/bin/python]:
Found possible Python library paths: /usr/local/lib/python3.6/dist-packages /usr/lib/python3/dist-packages Please input the desired Python library path to use. Default is [/usr/local/lib/python3.6/dist-packages]
Do you wish to build TensorFlow with jemalloc as malloc support? [Y/n]: Y jemalloc as malloc support will be enabled for TensorFlow.
Do you wish to build TensorFlow with Google Cloud Platform support? [Y/n]: Y Google Cloud Platform support will be enabled for TensorFlow.
Do you wish to build TensorFlow with Hadoop File System support? [Y/n]: Y Hadoop File System support will be enabled for TensorFlow.
Do you wish to build TensorFlow with Amazon AWS Platform support? [Y/n]: Y Amazon AWS Platform support will be enabled for TensorFlow.
Do you wish to build TensorFlow with Apache Kafka Platform support? [Y/n]: Y Apache Kafka Platform support will be enabled for TensorFlow.
Do you wish to build TensorFlow with XLA JIT support? [y/N]: N No XLA JIT support will be enabled for TensorFlow.
Do you wish to build TensorFlow with GDR support? [y/N]: N No GDR support will be enabled for TensorFlow.
Do you wish to build TensorFlow with VERBS support? [y/N]: N No VERBS support will be enabled for TensorFlow.
Do you wish to build TensorFlow with OpenCL SYCL support? [y/N]: N No OpenCL SYCL support will be enabled for TensorFlow.
Do you wish to build TensorFlow with CUDA support? [y/N]: y CUDA support will be enabled for TensorFlow.
Please specify the CUDA SDK version you want to use. [Leave empty to default to CUDA 9.0]: 9.2
Please specify the location where CUDA 9.2 toolkit is installed. Refer to README.md for more details. [Default is /usr/local/cuda]:
Please specify the cuDNN version you want to use. [Leave empty to default to cuDNN 7.0]: 7.1.4
Please specify the location where cuDNN 7 library is installed. Refer to README.md for more details. [Default is /usr/local/cuda]:
Do you wish to build TensorFlow with TensorRT support? [y/N]: N No TensorRT support will be enabled for TensorFlow.
Please specify the NCCL version you want to use. [Leave empty to default to NCCL 1.3]:
Please specify a list of comma-separated Cuda compute capabilities you want to build with. You can find the compute capability of your device at: https://developer.nvidia.com/cuda-gpus. Please note that each additional compute capability significantly increases your build time and binary size. [Default is: 5.2]
Do you want to use clang as CUDA compiler? [y/N]: N nvcc will be used as CUDA compiler.
Please specify which gcc should be used by nvcc as the host compiler. [Default is /usr/bin/gcc]:
Do you wish to build TensorFlow with MPI support? [y/N]: N No MPI support will be enabled for TensorFlow.
Please specify optimization flags to use during compilation when bazel option "--config=opt" is specified [Default is -march=native]:
Would you like to interactively configure ./WORKSPACE for Android builds? [y/N]: N Not configuring the WORKSPACE for Android builds.
Preconfigured Bazel build configs. You can use any of the below by adding "--config=<>" to your build command. See tools/bazel.rc for more details. --config=mkl # Build with MKL support. --config=monolithic # Config for mostly static monolithic build. Configuration finished
$ bazel-bin/tensorflow/tools/pip_package/build_pip_package /tmp/tensorflow_pkg Wed Jul 11 00:09:09 PDT 2018 : === Preparing sources indir: /tmp/tmp.5X0zsqfxYo /media/jiapei/Data/Downloads/machinelearning/deeplearning/tensorflow/tensorflow /media/jiapei/Data/Downloads/machinelearning/deeplearning/tensorflow/tensorflow /media/jiapei/Data/Downloads/machinelearning/deeplearning/tensorflow/tensorflow Wed Jul 11 00:09:35 PDT 2018 : === Building wheel warning: no files found matching '*.dll' under directory '*' warning: no files found matching '*.lib' under directory '*' warning: no files found matching '*.h' under directory 'tensorflow/include/tensorflow' warning: no files found matching '*' under directory 'tensorflow/include/Eigen' warning: no files found matching '*.h' under directory 'tensorflow/include/google' warning: no files found matching '*' under directory 'tensorflow/include/third_party' warning: no files found matching '*' under directory 'tensorflow/include/unsupported' Wed Jul 11 00:10:58 PDT 2018 : === Output wheel file is in: /tmp/tensorflow_pkg
Let’s have a look at what’s been built:
1 2
$ ls /tmp/tensorflow_pkg/ tensorflow-1.9.0rc0-cp36-cp36m-linux_x86_64.whl
4.2 Pip Installation
And, let’s have tensorflow-1.9.0rc0-cp36-cp36m-linux_x86_64.whl installed.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18
$ pip3 install /tmp/tensorflow_pkg/tensorflow-1.9.0rc0-cp36-cp36m-linux_x86_64.whl Processing /tmp/tensorflow_pkg/tensorflow-1.9.0rc0-cp36-cp36m-linux_x86_64.whl Requirement already satisfied: wheel>=0.26 in /usr/local/lib/python3.6/dist-packages (from tensorflow==1.9.0rc0) (0.31.1) Requirement already satisfied: gast>=0.2.0 in /usr/local/lib/python3.6/dist-packages (from tensorflow==1.9.0rc0) (0.2.0) Requirement already satisfied: numpy>=1.13.3 in /usr/local/lib/python3.6/dist-packages (from tensorflow==1.9.0rc0) (1.14.5) Requirement already satisfied: astor>=0.6.0 in /usr/local/lib/python3.6/dist-packages (from tensorflow==1.9.0rc0) (0.7.1) Requirement already satisfied: six>=1.10.0 in ./.local/lib/python3.6/site-packages (from tensorflow==1.9.0rc0) (1.11.0) Requirement already satisfied: grpcio>=1.8.6 in /usr/local/lib/python3.6/dist-packages (from tensorflow==1.9.0rc0) (1.13.0) Requirement already satisfied: absl-py>=0.1.6 in /usr/local/lib/python3.6/dist-packages (from tensorflow==1.9.0rc0) (0.2.2) Requirement already satisfied: tensorboard<1.9.0,>=1.8.0 in /usr/local/lib/python3.6/dist-packages (from tensorflow==1.9.0rc0) (1.8.0) Requirement already satisfied: termcolor>=1.1.0 in /usr/local/lib/python3.6/dist-packages (from tensorflow==1.9.0rc0) (1.1.0) Requirement already satisfied: setuptools<=39.1.0 in /usr/local/lib/python3.6/dist-packages (from tensorflow==1.9.0rc0) (39.1.0) Requirement already satisfied: protobuf>=3.6.0 in /usr/local/lib/python3.6/dist-packages (from tensorflow==1.9.0rc0) (3.6.0) Requirement already satisfied: bleach==1.5.0 in /usr/local/lib/python3.6/dist-packages (from tensorboard<1.9.0,>=1.8.0->tensorflow==1.9.0rc0) (1.5.0) Requirement already satisfied: html5lib==0.9999999 in /usr/local/lib/python3.6/dist-packages (from tensorboard<1.9.0,>=1.8.0->tensorflow==1.9.0rc0) (0.9999999) Requirement already satisfied: werkzeug>=0.11.10 in ./.local/lib/python3.6/site-packages (from tensorboard<1.9.0,>=1.8.0->tensorflow==1.9.0rc0) (0.14.1) Requirement already satisfied: markdown>=2.6.8 in /usr/local/lib/python3.6/dist-packages (from tensorboard<1.9.0,>=1.8.0->tensorflow==1.9.0rc0) (2.6.11) Successfully installed tensorflow-1.9.0rc0
Let’s test if Tensorflow has been successfully installed.
4.3 Check Tensorflow
1 2 3 4 5 6 7
$ python Python 3.6.5 (default, Apr 1 2018, 05:46:30) [GCC 7.3.0] on linux Type "help", "copyright", "credits" or "license"for more information. >>> import tensorflow as tf >>> tf.__version__ '1.9.0-rc0'
5. Keras Installation
After successfully check out Keras, we can easily have Keras installed by command python setup.py install.
Installed /usr/local/lib/python3.6/dist-packages/Keras-2.2.0-py3.6.egg Processing dependencies for Keras==2.2.0 Searching for Keras-Preprocessing==1.0.1 Best match: Keras-Preprocessing 1.0.1 Adding Keras-Preprocessing 1.0.1 to easy-install.pth file
Using /usr/local/lib/python3.6/dist-packages Searching for Keras-Applications==1.0.2 Best match: Keras-Applications 1.0.2 Adding Keras-Applications 1.0.2 to easy-install.pth file
Using /usr/local/lib/python3.6/dist-packages Searching for h5py==2.8.0 Best match: h5py 2.8.0 Adding h5py 2.8.0 to easy-install.pth file
Using /usr/local/lib/python3.6/dist-packages Searching for PyYAML==3.13 Best match: PyYAML 3.13 Adding PyYAML 3.13 to easy-install.pth file
Using /usr/local/lib/python3.6/dist-packages Searching for six==1.11.0 Best match: six 1.11.0 Adding six 1.11.0 to easy-install.pth file
Using /usr/lib/python3/dist-packages Searching for scipy==1.1.0 Best match: scipy 1.1.0 Adding scipy 1.1.0 to easy-install.pth file
Using /usr/local/lib/python3.6/dist-packages Searching for numpy==1.14.5 Best match: numpy 1.14.5 Adding numpy 1.14.5 to easy-install.pth file
Using /usr/local/lib/python3.6/dist-packages Finished processing dependencies for Keras==2.2.0
That’s all for today. I think Python is seriously cool, handy indeed. I myself will still recommend Pytorch, but it seems Tensorflow and Keras are also very popular in North America.
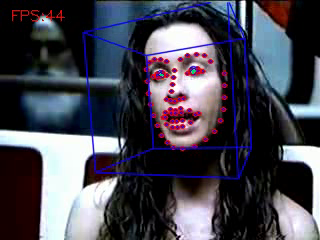
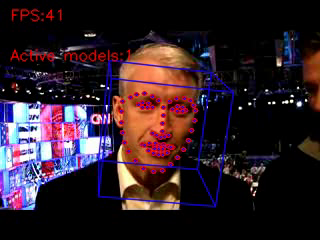
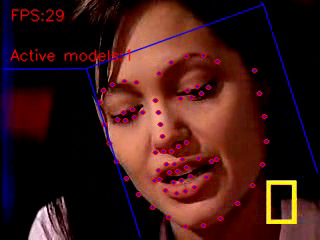
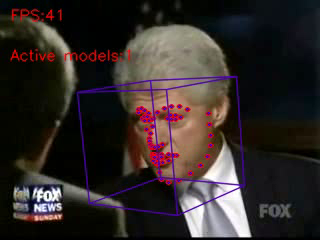
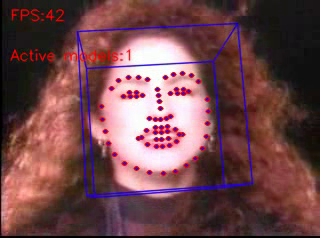
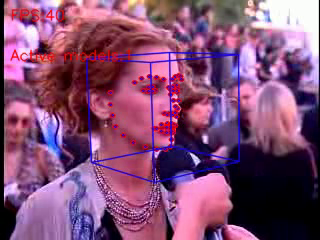
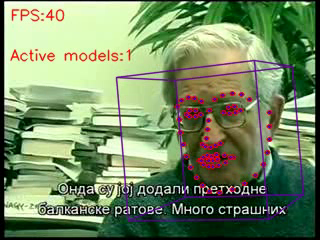
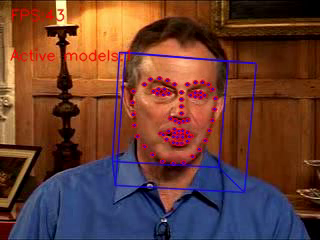
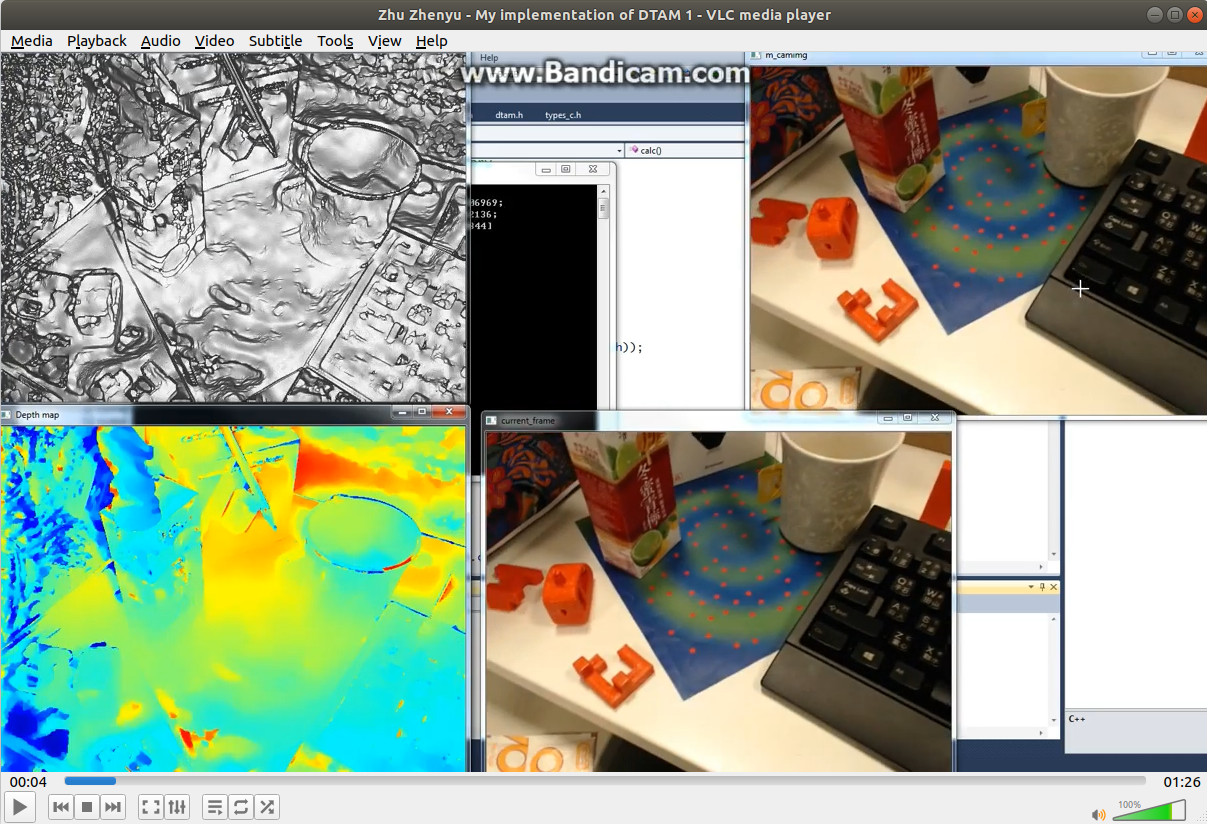
I’m quite busy today. So, I’d just post some videos to show the performance about jiu bu gao su ni :laughing: Click on the pictures to open an uploaded Facebook video.
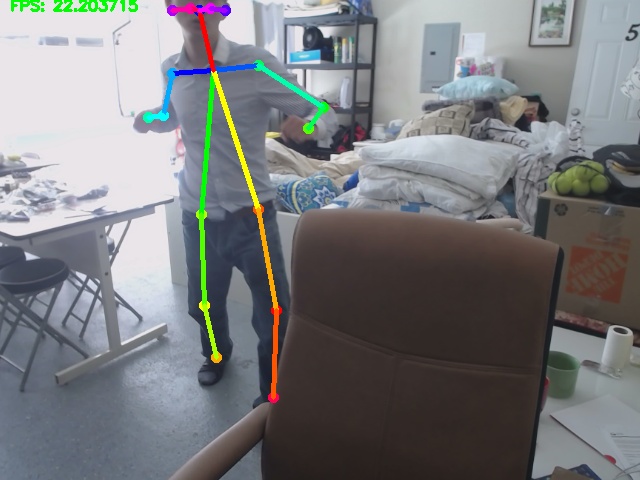
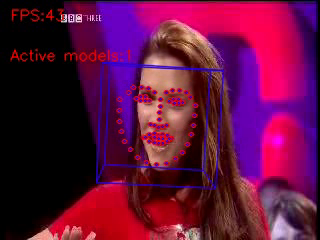
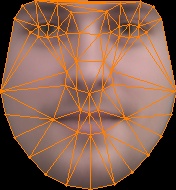
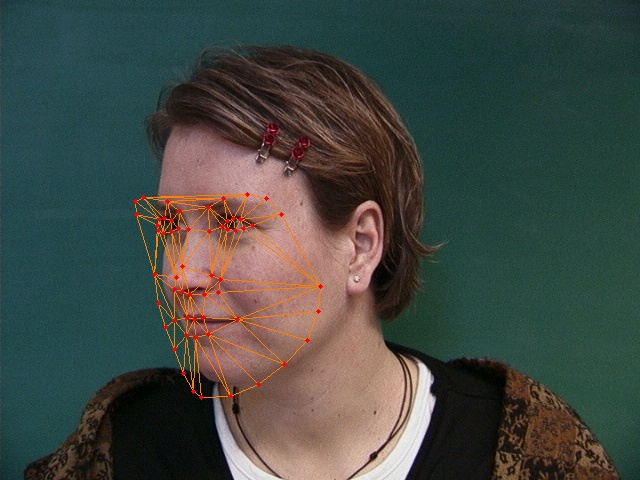
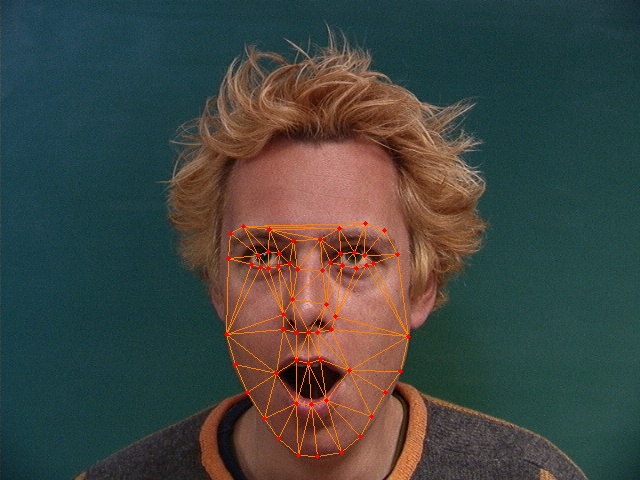
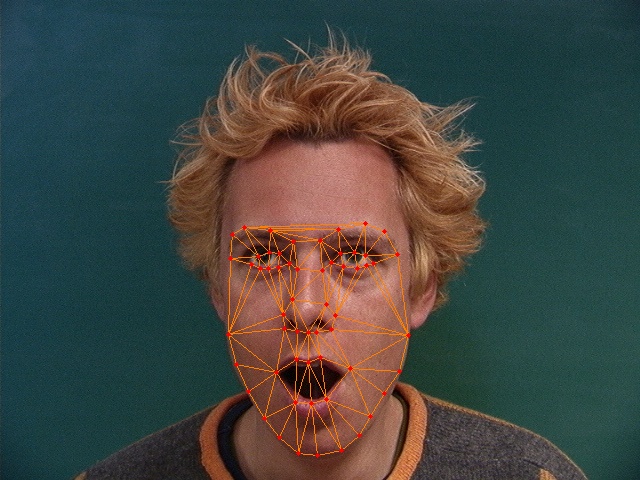
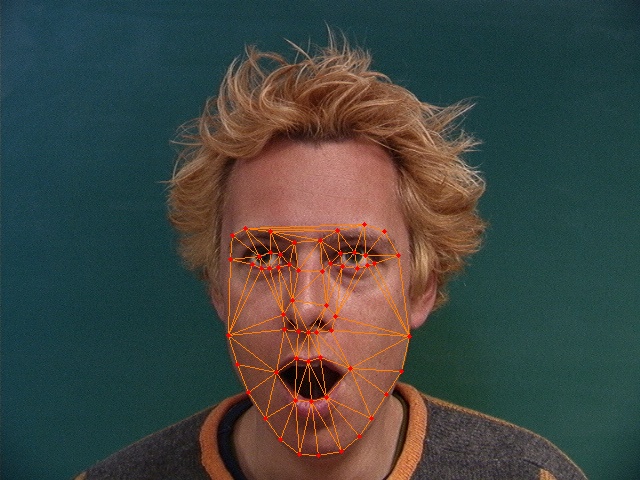
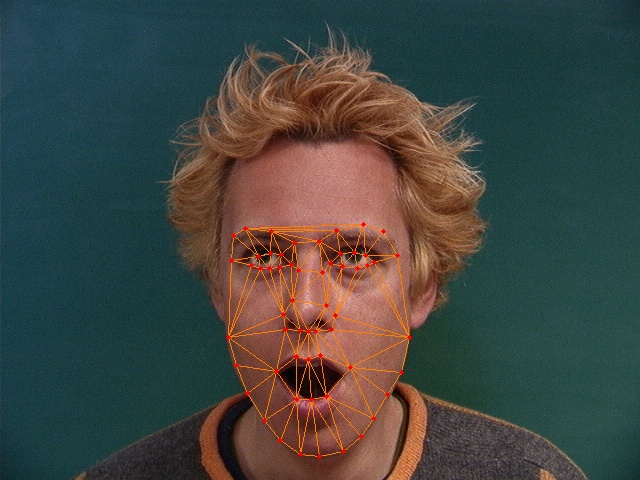
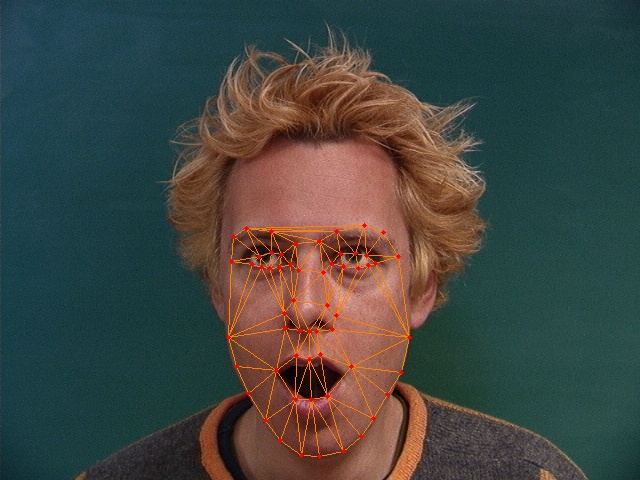
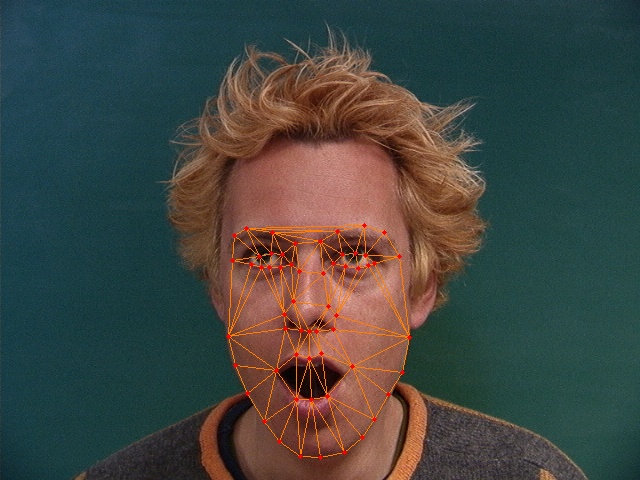
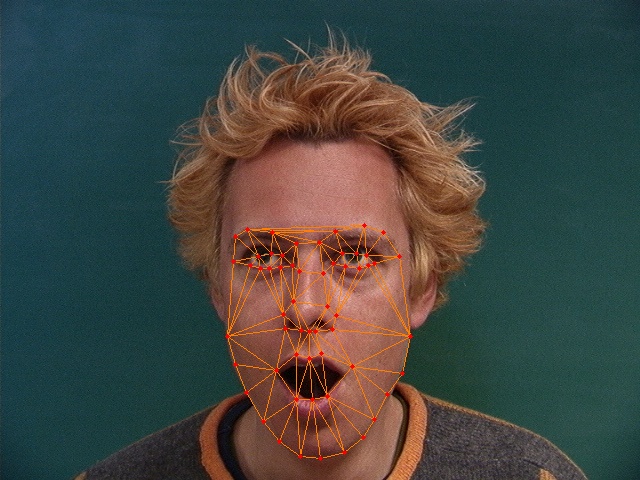
1. Key Point Localization
1.1 Nobody - Yeah, it’s ME, 10 YEARS ago. How time flies…
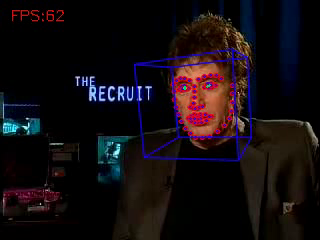
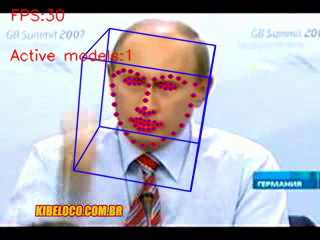
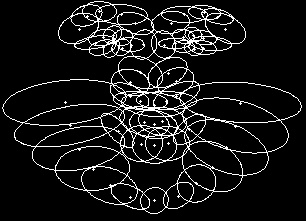
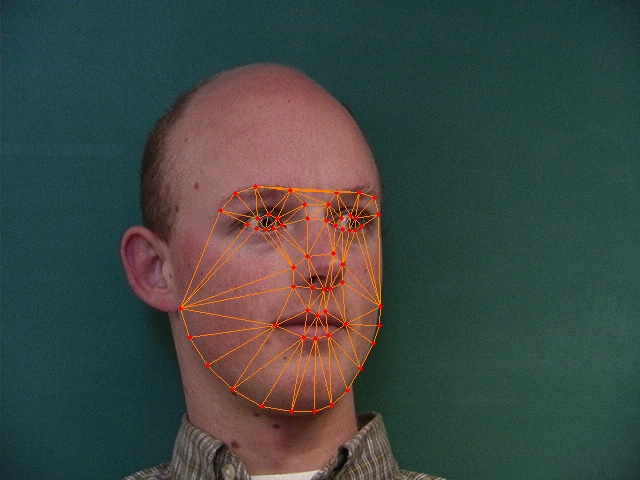
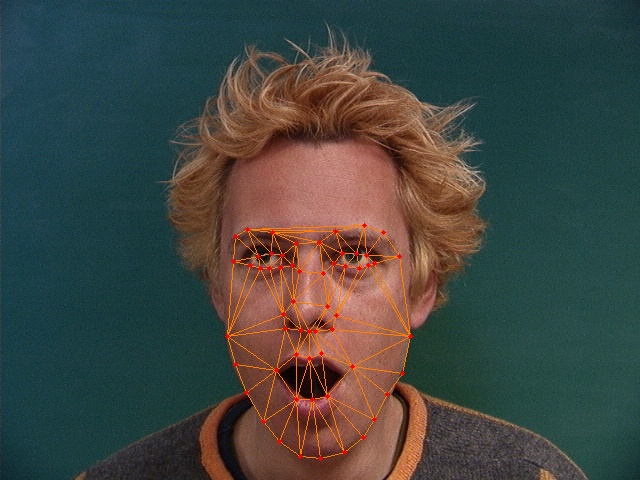
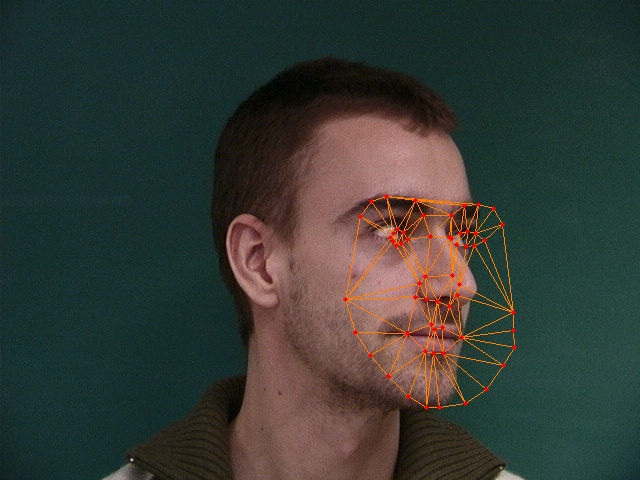
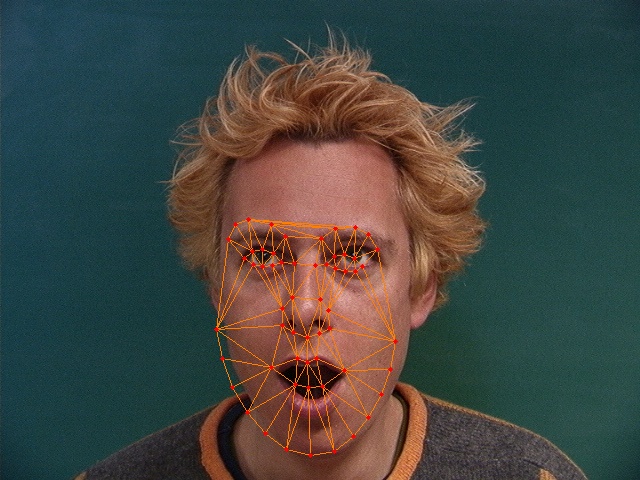
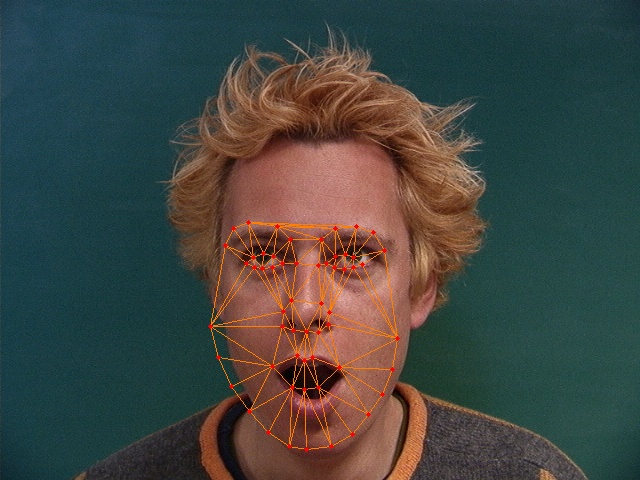
1.2 FRANCK - What a Canonical Annotated Face Dataset
Just notice this news about ImageAI today. So, I just had it tested for fun. I seriously don’t want to talk about ImageAI too much, you can follow the author’s github and it shouldn’t be that hard to have everything done in minutes.
1. Preparation
1.1 Prerequisite Dependencies
As described by on ImageAI’s Github, multiple Python dependencies need to be installed:
Tensorflow
Numpy
SciPy
OpenCV
Pillow
Matplotlib
h5py
Keras
All packages can be easily installed by command:
1
pip3 install PackageName
Afterwards, ImageAI can be installed by a single command:
$ python FirstPrediction.py 2018-07-02 18:12:09.275412: I tensorflow/core/platform/cpu_feature_guard.cc:140] Your CPU supports instructions that this TensorFlow binary was not compiled to use: AVX2 FMA convertible : 52.45954394340515 sports_car : 37.61279881000519 pickup : 3.1751133501529694 car_wheel : 1.817503571510315 minivan : 1.748703233897686
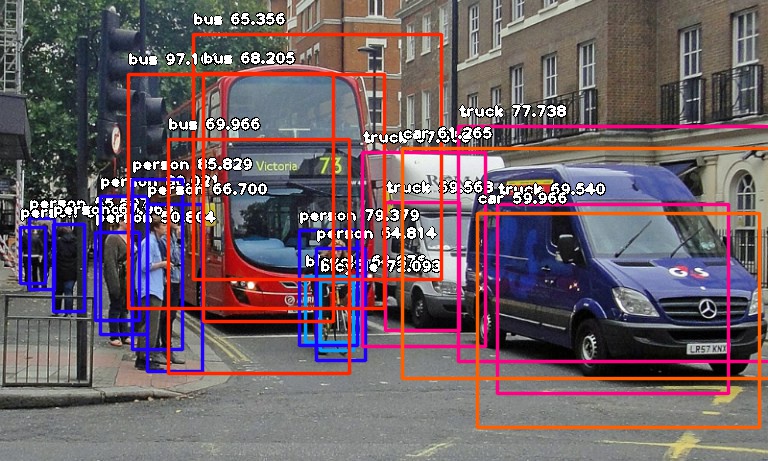
$ python FirstDetection.py Using TensorFlow backend. 2018-07-02 18:23:09.634037: I tensorflow/core/platform/cpu_feature_guard.cc:140] Your CPU supports instructions that this TensorFlow binary was not compiled to use: AVX2 FMA 2018-07-02 18:23:11.744790: W tensorflow/core/framework/allocator.cc:101] Allocation of 68300800 exceeds 10% of system memory. 2018-07-02 18:23:11.958081: W tensorflow/core/framework/allocator.cc:101] Allocation of 68403200 exceeds 10% of system memory. 2018-07-02 18:23:12.174739: W tensorflow/core/framework/allocator.cc:101] Allocation of 68403200 exceeds 10% of system memory. 2018-07-02 18:23:12.433540: W tensorflow/core/framework/allocator.cc:101] Allocation of 68403200 exceeds 10% of system memory. 2018-07-02 18:23:12.694631: W tensorflow/core/framework/allocator.cc:101] Allocation of 68403200 exceeds 10% of system memory. 2018-07-02 18:23:16.267111: W tensorflow/core/framework/allocator.cc:101] Allocation of 64224000 exceeds 10% of system memory. 2018-07-02 18:23:16.370939: W tensorflow/core/framework/allocator.cc:101] Allocation of 64224000 exceeds 10% of system memory. 2018-07-02 18:23:16.403353: W tensorflow/core/framework/allocator.cc:101] Allocation of 67435200 exceeds 10% of system memory. person : 55.596935749053955 person : 66.90954566001892 person : 67.96322464942932 person : 50.80411434173584 bicycle : 64.87574577331543 bicycle : 72.0929205417633 person : 80.02063035964966 person : 85.82872748374939 truck : 59.56767797470093 person : 66.69963002204895 person : 79.37889695167542 person : 64.81361389160156 bus : 65.35580158233643 bus : 97.16107249259949 bus : 68.20474863052368 truck : 67.65954494476318 truck : 77.73774266242981 bus : 69.96590495109558 truck : 69.54039335250854 car : 61.26518249511719 car : 59.965676069259644
And, under the program folder, you will get an output image:
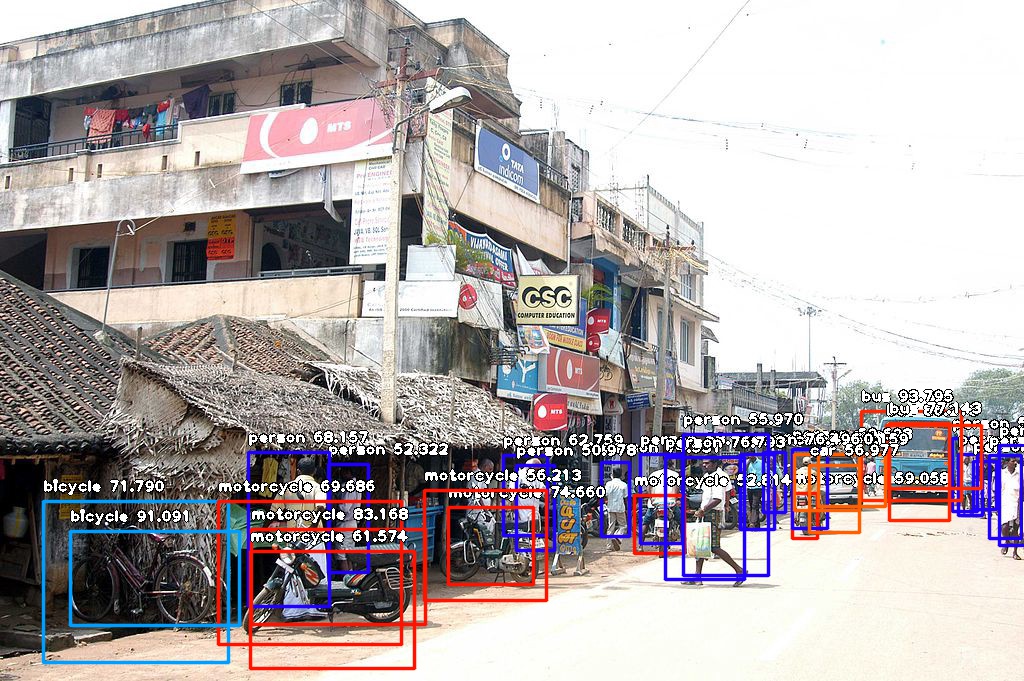
$ python FirstDetection.py Using TensorFlow backend. 2018-07-02 18:25:24.919351: I tensorflow/core/platform/cpu_feature_guard.cc:140] Your CPU supports instructions that this TensorFlow binary was not compiled to use: AVX2 FMA person : 53.27633619308472 person : 52.71329879760742 person : 63.67729902267456 person : 55.00321388244629 person : 74.53054189682007 person : 51.54905915260315 motorcycle : 59.057921171188354 bus : 93.79504919052124 bus : 86.21828556060791 bus : 77.143394947052 person : 59.69809293746948 car : 71.79147601127625 car : 60.15858054161072 person : 62.758803367614746 person : 58.786213397979736 person : 76.49624943733215 car : 56.977421045303345 person : 67.86248683929443 person : 50.977784395217896 person : 52.3215651512146 motorcycle : 52.81376242637634 person : 76.79281234741211 motorcycle : 74.65972304344177 person : 55.96961975097656 person : 68.15704107284546 motorcycle : 56.21282458305359 bicycle : 71.78951501846313 motorcycle : 69.68616843223572 bicycle : 91.09067916870117 motorcycle : 83.16765427589417 motorcycle : 61.57424449920654
And, under the program folder, you will get an output image:
It has been quite a while that my VOSM has NOT been updated. My bad for sure. But today, I have it updated, and VOSM-0.3.5 is released. Just refer to the following 3 pages on github:
To download videos from Youtube is sometimes required. Some Chrome plugins can be used to download Youtube videos, such as: Youtube Downloader. Other methods can also be found on various resources, such as: WikiHow.
In this blog, I’m going to cite (copy and paste) from WikiHow about How to download Youtube videos by using VLC.
STEP1: Copy Youtube URL
Find the Youtube video that you would like to download, and copy the Youtube URL.
STEP 2: Broadcast Youtube Video in VLC
Paste the URL under VLC Media Player->Media->Open Network Stream->Network Tab->Please enter a network URL:, and Play:
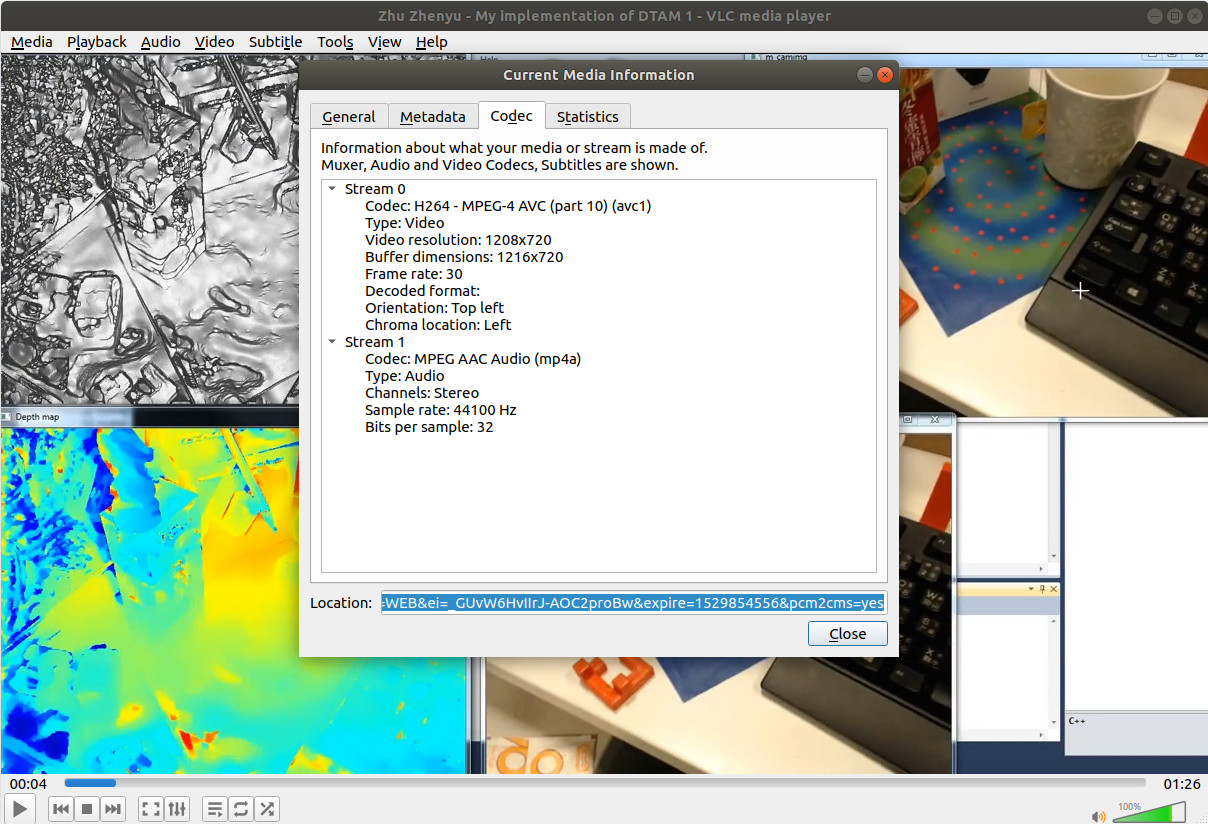
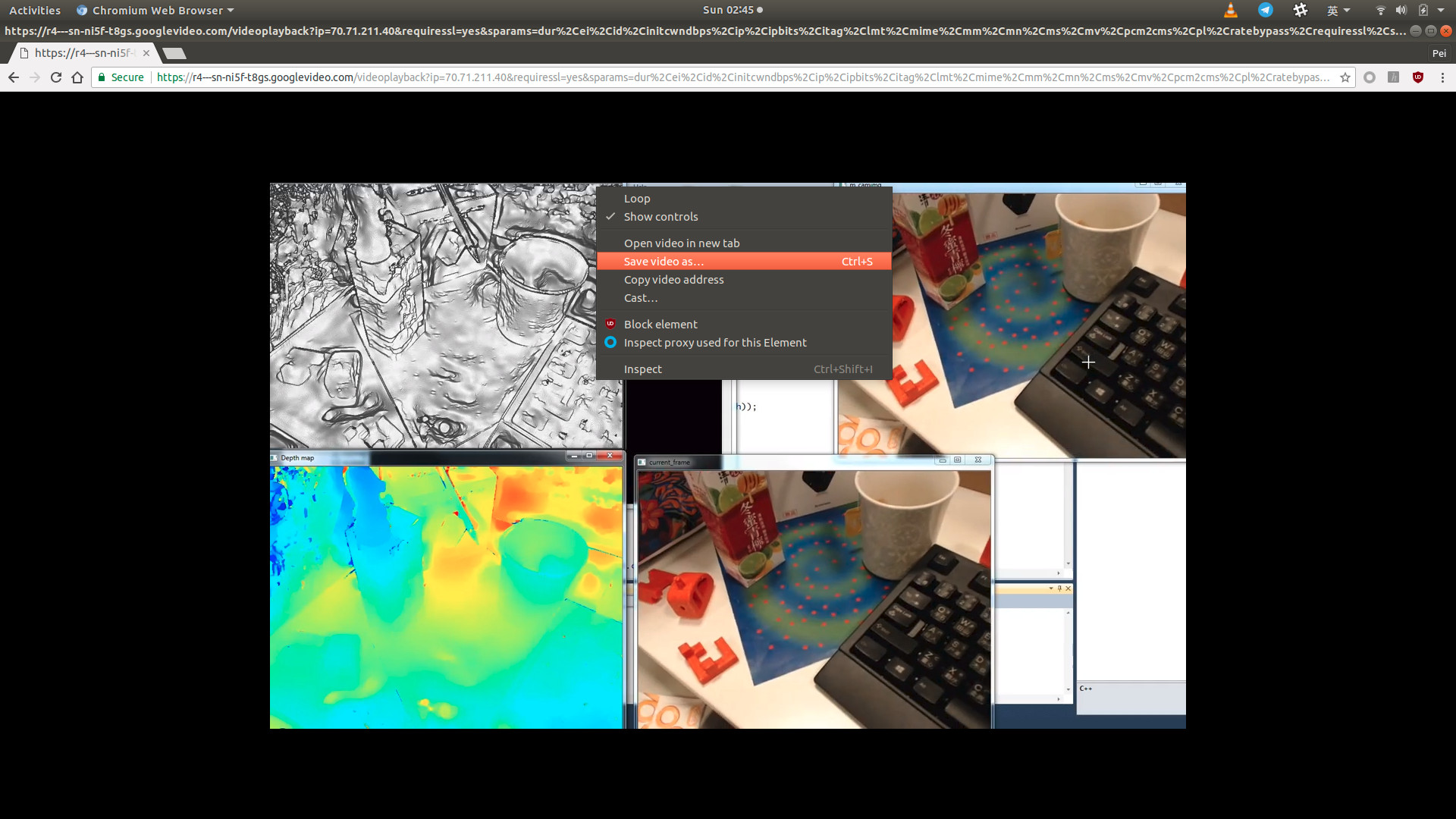
STEP 3: Get the Real Location of Youtube Video
Then, copy the URL under Tools->Codec Information->Codec->Location: